Hi all. I would like to get started with an RTK lightbar and IMU to correct roll.
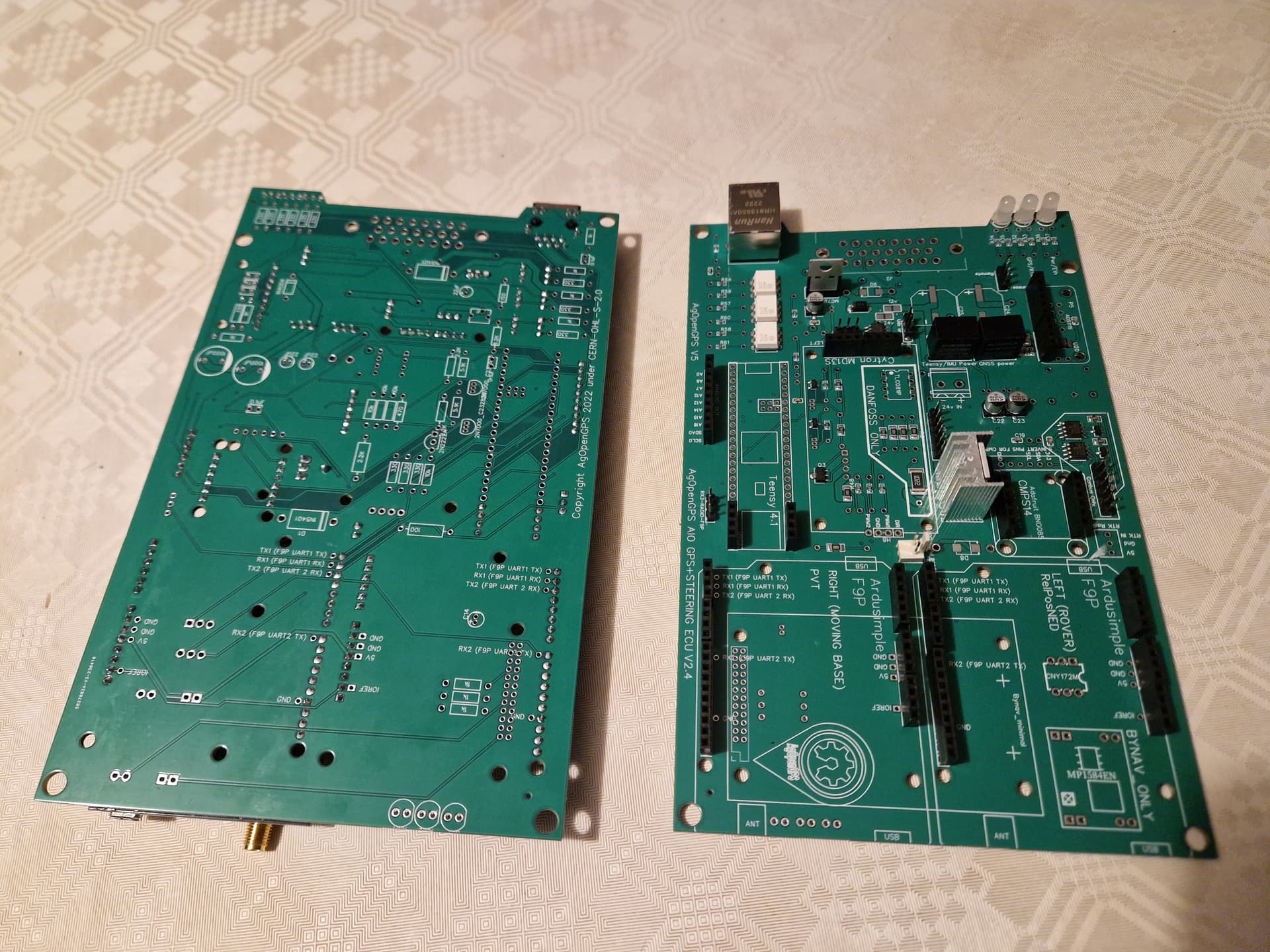
Ive attached photos of my board -
What components do i need to get this basic setup to work? I already have the RTK setup, im just trying to get the IMU corrections as our farm is steep.
Will the teensy, IMU & F9P talk on the board as it is, and how can i power it all temporarily?
I intend to go autosteer, but im keen to do it in steps.
I started off with what you want to do. Had the f9p imu bno085 and a nanno with ethernet adapter on top. Mounted it all in a little box and was fine. I used the f9p and the bno085 for the aio project of autosteer then.
You could probably run it through the aio board using the f9p and imu and buy the teensy 4.1.
You’ll need header pins for the teensy 4.1 and the ampseal connector
1 Like
Thanks ![]()
I find it difficult to figure out what code belongs to which board & situation…
Which code / file do i need to load to the Teensy?
Im familiar with Arduino IDE, so i was hoping it would be a doddle…
Yeah its in the teensy modules file, autosteer udp something like that. Cant picture it now im afraid
1 Like
It is on github beside the aog program.
Scroll down to configuring the teensy
1 Like
Im struggling to connect using ethernet - are there any good tutorials out there?
Ive got IMU & GPS connected via USB. Will the devices pop up as Com Ports?
Have you turned udp on it ethernet configuration/ setup