If you use tailscale, you don’t need an IP (provided by tailscale), and you don’t need to open a port.
Hi @Stefal! There is a project on Github to output system data to the SSD1306 display, via the i2c bus. is it possible to integrate this into your project?
vadzimyatskevich/SSD1306: Add OLED display with system information to your board (github.com)
It’s not difficult. I think RTKBase is mainly Python.
Hi!
I don’t think I will integrate this inside RTKBase.
But !
But it could be interesting to offer an access to various RTKBase informations. Adding an API might be a solution. And i’ve already drafted some code to easily detect a base station running on a network.
I don’t know when a release with it will be available.
EDIT : Sending these informations to a Mqtt broker could be useful too.
Thanks for the reply. I will be waiting for the new release)
My base suddenly is getting banned on rtk2go. They claim it starts the send but doesn’t complete the send. Anyone else seeing this. Local caster is working fine.
I am trying to send radio corrections via RTKBase. I purchased Ardusimple XLR kit. I cant get the base and rover to connect. I had it once but have been unsuccessful since. I did try changing some settings in XTCU but I am unable to configure the XLR. Is there a way to do that otherwise?
Typically if you are using the Xbee radios you shouldn’t use RTKbase. The radios talk base F9P (base) —> Xbee sender —-> xbee receiver—-> F9P (Rover)
I am wanting the option of ntrip or radio so I thought I would go through the RTKBase. I also need the RTKBase for sending 1008 messages for Trimble.
The kit from arduSimple comes pre configured. The only setting you might need to change is the Xbee serial baud rate but you can change that in rtkbase.
RTKBase v2.6 will be available soon.
If you want to test the latest release candidate, you can :
- Download the update from here
- Open the RTKbase web interface on this page: http://ip_of_your_base/manual_update
- Choose the file you’ve just downloaded and press the submit button
- You won’t see any progress during the update, you will have to go to http://ip_of_your_base/ manually after a few minutes. If you want to follow the update process :
sudo tail -f /var/log/syslogorsudo journalctl
If you find a bug, please let me know so that I can fix it before the final release.
release note : rtkbase/CHANGELOG.md at 04c38a99079da7db92f13ab125f39f40b2491764 · Stefal/rtkbase · GitHub
5 Likes
Brilliant, supports the Mosaic X5.
@stefal. Thanks for this terrific software.
For safety, I am trying to validate that my reference GNSS antenna has not been moved before using it for RTK purposes.
When I power cycle the base station computer, I get convergence of
RTKLIB demo5 b34i PPP-static mode (STATUS tab of RTKBase web page) that looks something like the graph below.
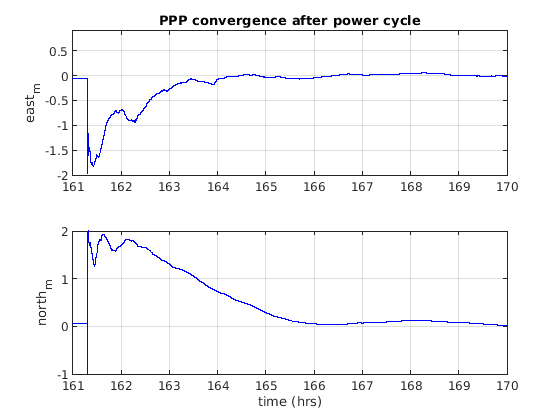
Showing East and North error in meters.
My question:
To your knowledge, is there an easy way to initialize the PPP-static solution so that the convergence is much faster in the (likely) case where the antenna LLA position is known and unchanged?
2 Likes
Anybody know how to disable the Raspberry Pi cooling fan, or at least adjust the temperature setpoint? Mine has gotten pretty loud and the on/off cycle every ten seconds is driving me nuts…I could cut the wires but would prefer a software solution
Same here. Just happened the other day. Local caster is good, and I’m also sending to rtkdata.online, and that is good there. Some sort of Rtk2Go problem I think. After this latest ban I’m done with rtk2go. I’ll stick with rtkdata.online and also my local caster over vpn.
1 Like
Hi im using emlid for a while now and I noticed a problem I’m unable to resolve. Sometimes I lose rtk, when I connect to the base using Tailscale the base is working fine but Ntrip checker shows that data is not being transmitted and aog shows only the number 12. After I restart the Ntrip A service it works fine, sometimes for days
I guess my complaint against rtk2go was misplaced then. I can believe str2str sometimes goes stupid. Not sure how to detect that and fix it preemptively, though.
@martinmcc @Orin_farmer @torriem
Which Operating system do you run on your base?
I’ve noticed that sometimes with buster and bullseye, the main service doesn’t connect successfuly with the F9P. I don’t have any feedback on this problem with bookworm.
But in these cases, all services ntrip/local_caster/serial/… didn’t stream any data at all
If you can, please take a look at the logs.
another possibility: a problem related with this bug : The b34i version has buffer overrun issues in NTRIP · Issue #302 · rtklibexplorer/RTKLIB · GitHub
Im using Orange pi zero Debian 11 Bullseye
Found this on the web https://www.cyberciti.biz/faq/update-upgrade-debian-11-to-debian-12-bookworm/#google_vignette
Can a os be updated this way
Yes. Its possible to upgrade a Linux system this way. You have to read it carefully.