How hard is this to install in a VM ie Proxmox? Anybody have a script? Trying to consolidate all the random electronics around my house…
Jeg installerede version 2,40 igen og så opdaterede derfra så er den på WIFI ellers tak ![]()
1 Like
Hello, I’m from Poland. I am building Stefal base gnss stations. I am at the stage of determining the exact location of the antenna. What value should I set in “file rotation” and “file overlap”? I know that I should have a file with at least 15 days of observations. I read the guides from github. Currently Creates a file every 24 hours. Should I wait 15 days and select the file from the 15th day and convert it to Rinex? Should I set the value in “file rotation” =360 (15 x 24h) and download this file Nrcan? Can I use the standard Ardusimple ANN-MB-00 antenna?
IIRC 24 hours is all thats needed for a single file, as that service that converts it to GPS coordinates will truncate to 24 hours anyway. Maybe someone can correct me if I’m wrong though.
Yes, I would say send a 15 days old 24h scan.
Standard ANN-MB with a 12cm steel ground plane work fine for me for 4 years now.
Survey antenna could give more satellites as the decibel are a bit higher typically.
Is there a particular test or some metrics to rate the quality of my corrections? I’m kind of just assuming it works.
On the tractor I get age of RTK bouncing between 1 to 2 seconds. PDOP 1.7ish, HDOP 0.9ish. 12-15 satellites give or take. Is that considered “good” or just good enough? Hoping to do some RTK landforming so accuracy is pretty important for that as far as I know.
On the Centipede-RTK network, we refuse base sation with ann-mn antenna.
There are too many problems with cycle slips and reliability.
Hi @Stefal
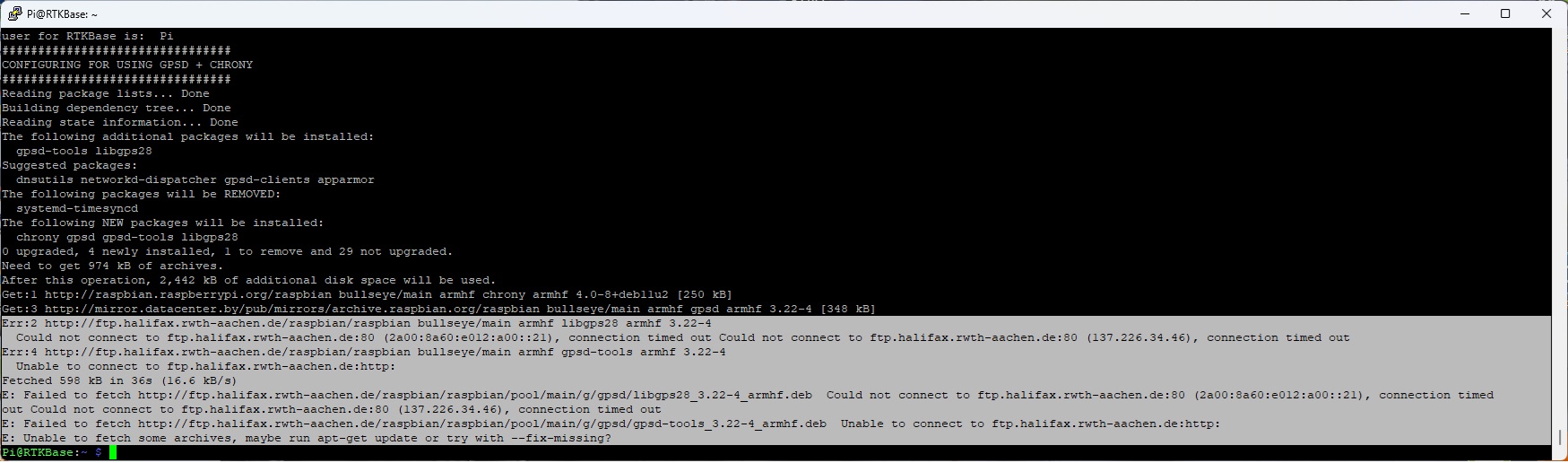
I tried to install the system on Raspberry Pi Zero W. But the same error appeared.
@AntonioI do you have a solution for this? I’m commissioning a LC29H BS at the moment, and before I dive in, it may save me some effort of someone already knows what is going on.
Update: I got it working, the GPS unit needs some preconfiguration.
I’ve documented it at How to configure Quectel LC29HBS · Issue #425 · Stefal/rtkbase · GitHub
I have encountered an issue with RTKBase when trying to use the data logging service. After logging data for about 1.5 days after installing my base station, the base registered location reverts back to the default location of france while my realtime base location remains correct. At first I thought this may have been caused by a reboot of the raspberry pi overnight, but after looking at the uptime in the settings menu it shows to have been running the entire time since installing it. Would anyone know what the cause of this would be and if there is any configurations I should make to the prevent it from happening again in the future? If the base registered location decides to revert back to france again but he realtime location is correct, will this negatively impact my final base station location accuracy after submitting the log file to nrcan for post processing?
*** Update: Of course I figured it out as soon as I made this post. Leave it here for anyone that wants to replicate. I had to add /dev/ttyACM0 as a device passthrough in my Debian container on the resources tab. Now to figure out why it doesn’t see any satellites. ***
Hey folks, I’m trying to get this installed in a Proxmox VM. I set up a VM with Debian 11, apt update/upgrade, install sudo and usbutils, create user “rtkbase” with sudo privileges and then I run the codes from the git page (I have to add the --user rtkbase snippet to make it work):
wget https://raw.githubusercontent.com/Stefal/rtkbase/master/tools/install.sh -O install.sh
chmod +x install.sh
sudo ./install.sh --all release --user rtkbase
All works great so far, I can log into the web UI…but then…
Theres no receiver. I’m using a fresh F9P out of the box (never connected to uCenter or anything). I can see it in Console when I run usbutils as “U-Blox AG ublox-GNSS receiver”.
Here’s the very end of the install script where it handles the receiver - it clearly recognizes it but then fails for some reason:
################################
USB GNSS RECEIVER DETECTION
################################
/dev/ttyACM0 - u-blox - 115200
GNSS RECEIVER DETECTED: /dev/ttyACM0 - u-blox - 115200
################################
CONFIGURE GNSS RECEIVER
################################
ubxtool: failed to open input file /dev/ttyACM0
No Gnss receiver has been set. We can't configure
################################
STARTING SERVICES
################################
Created symlink /etc/systemd/system/multi-user.target.wants/str2str_tcp.service -> /etc/systemd/system/str2str_tcp.service.
Job for gpsd.service failed because the control process exited with error code.
See "systemctl status gpsd.service" and "journalctl -xe" for details.
Job for chrony.service failed because the control process exited with error code.
See "systemctl status chrony.service" and "journalctl -xe" for details.
################################
END OF INSTALLATION
I’m no linux expert but when I navigate to /dev/, there is tty, tty1, and tty2, but nothing called “ttyACM0”. I ran the install script from the user rtkbase, not root.
Any advice how to get this working?
Edit to add: If I click detect/configure on the Settings page it detects u-blox on /dev/ttyACM0, but again fails to configure
Well new troubles, anybody know what I need to do to get antennas to show up?
I’ve tried plugging it into the antenna from my existing Pi-based base station and it doesn’t see any. Switch it back and my Pi setup works just fine.
I then plugged this board into u-center and without changing any settings, it immediately shows plenty of satellites and gets a 3D fix. So board must be fine but just not communicating with the Debian VM?
Not sure if its relevant but I also noticed the buttons on the settings screen turn orange when enabled rather than green on my other install. Does that indicate an issue? Or possibly the raw2nmea service being inactive?
RTKBase 2.6.2 is available
To update your base, just press the “Check update” button, and wait for a few minutes.
Changelog
[2.6.2] - 2024-10-06
Added
- Added Rtkbase gnss reverse proxy service in the diagnostic view. #421
Fixed
- Remove firstboot service on Raspberry Pi image >= 2.5 which was causing services to stay stopped after a reboot. #436
- Reboot autorefresh timeout is now 90s. #426
2 Likes
I am wanting to use my RTKBase as a mobile base. Is it possible to send out corrections via the Serial for radio without wifi? Or do I need wifi for the system to work at all?
RTK Base includes the RTCM serial service option, no problem to use radios with a serial interface.
1 Like
So if I understand correctly, I only need wifi if I want to use NTRIP options?
You’ll need it connected to wifi or ethernet to configure it via the web page interface to send RTCM over serial. After that, though, wifi or ethernet would not be required.
1 Like
Thanks I have it working as stationary base currently but am wanting to use for ditching so thought it would be better if it was in the field. Im sending corrections to a Trimble FMX and it doesnt seem as stable as Trimble radio but Trimble radio isnt reliable enough ![]()
It is possible to manually update from a file? I try to update online but nothing changes for several hours.
{kind=link}
@Stefal do you have CLI update instructions somewhere? I couldn’t find any on your github, only the first install instructions.