This was tested with nothing attached, only 12V power.
Ahhhhhh, changelog.txt tells: “C44 => R100 (otherwise the SMPS doesn’t switch off)”. ![]()
Value: something >= 10kOhm
You can put that resistor on top of the existing cap.
2 Likes
License update done to Cern-OpenHardwareLicense-S-2.0 to keep the project open for everyone in the future. Everyone is allowed to copy and produce everything, but has to open her/his mods for the community.
1 Like
Blockquote[quote=“GoRoNb, post:147, topic:3640, full:true”]
You’re right, M12A is made for a nominal constant current of 4A. 4A is a lot! In real life, you will only exceed that current when the motor works against you, and in that case, the autosteering should be terminated automatically in my opinion. That’s why you have a current signal on A7. Will add some lines of code for automatic disengaging.
[/quote]
Is there a current sensor on the board? Or do you mean we could make a setup similar to this wiring? https://github.com/farmerbriantee/AgOpenGPS/blob/master/Support/Wirings/090-SensorCurrent.png
If I understand well, the disengaging code is now included in Agopengps.
the output stage has an embedded current mirror, so what you see on A7 is proportional to the current. You simply need to relocate vom A0 to A7 I think (didn’t test it yet). Mint that there intentionally is an offset:
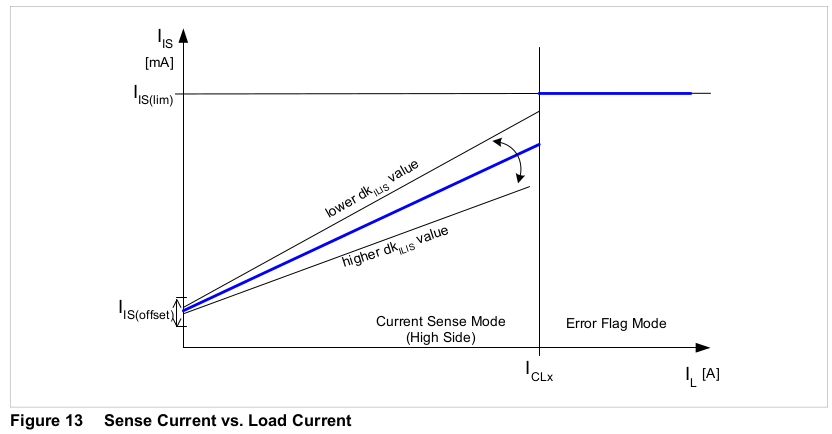
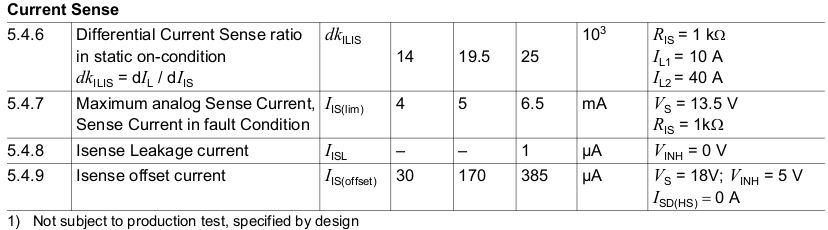
Iis is the current in R12/R20, so the Atmel sees a voltage of U = Iis x 500
(information taken from BTN8982 datasheet)
there is no need to disable anything from the hardware point of view - it’s all I²C, so you can have several devices as long, two devices don’t have the same I²C address. Yes, the support of the MMA was deprecated by the Masters of Software, but if you’ve no chance to buy an BNO or CMPS, you can of course put the code for that in again.
Thanks very much.
I already have a bno085.
I’m just missing a pcb.
This pcb is very well designed.
I think this is the right one for me.
Is it possible to get a single one from jlcpcb?
no, they start with 5. but likely it’s easy to find four other guys here…
Also the cost mainly comes from delivery for any decent delivery time. Ordering 1 or 5 would cost almost the same.
EDIT: I was thinking about a bare PCB, smd assembled one gets more expensive.
Another way is, order 5 pcb and select only 2 piece for smd assembly. (3 blank pcb for the bin).
5 does seem like a lot, until you figure the amazing value for the money. This is a preassembled pcb with motor controller, Arduino, ads, + much more. The cost for each board is about what one motor controller cost alone. The talent on this forum amazes me!
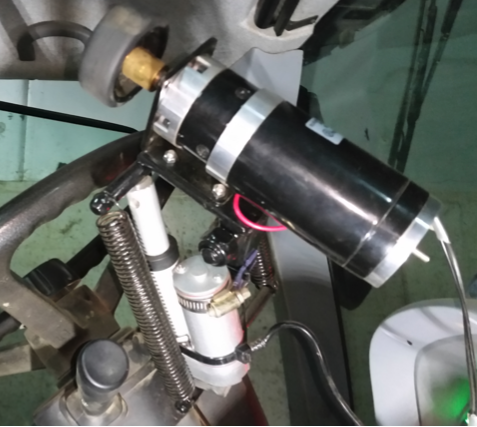
Hello @GoRoNb , is it possible that the power supply on the USB hub is not reliable in some environments, or that the rooftop unit is vulnerable? I was doing a first field test today with the roof unit attached to the central unit v1.4 as in the image. Within minutes, GPS communication stops and AgIO freezes. This happens when the motor or actuator in the system draw current. The system is well grounded directly to the battery. With the rooftop unit detached, in simulator mode the system so far was very robust. I think I will now test with supplying 12V with MP1584 module to the rooftop unit directly (reference HW_for_AgOpenGPS/Schematic_Rooftop Unit for AgOpenGPS.pdf at main · GormR/HW_for_AgOpenGPS · GitHub )

that’s difficult to say via internet. The picture shows very good cables of course. With 12V you have much more headroom of course, but maybe a bigger electrolytic cap may also help
I assume you mean C2 (220 uF). What capacitor would you suggest?
External power did not help. Could this be a symptom of a badly soldered FE1.1s chip?
good question. if the data was lost, it pretty much the same than power loss. There is a trick: if you put ice spray (for electronic) on the FE1.1: is it stable? Normally this shows bad solderings quite good
Back at the table I have narrowed it down and it appears the activation of an actuator just next to to the Phidgets motor induces a very short communication break. The closer the two are, the worse. It even happens when the actuator is powered from a different source with no physical connection of the circuits. Some electromagnetic effects must be at work.
All 3 autosteer kits I built have this same behavior so I’m thinking the central units are built and soldered just fine. Either the central unit has some undiscovered weakness or else this particular setup with actuator-motor is the coincidental problem causer. Which I find strange because I was using it for 3 years in a setup with everything connected with bluetooth modules (HC-05).
Someone who recognizes this behavior or might know what to do/try? My next field test will be without actuators for sure. Which is a bummer, it was a quick and easy way to disengage the steering motor.
the 0V signals of power stage and µC part are intentionally decoupled. Likeley you have connected the supply to the power stage directly to any 12V high power socket. How did you connect the supply of the µC part / tablet? Via the 12V charger of the tablet?
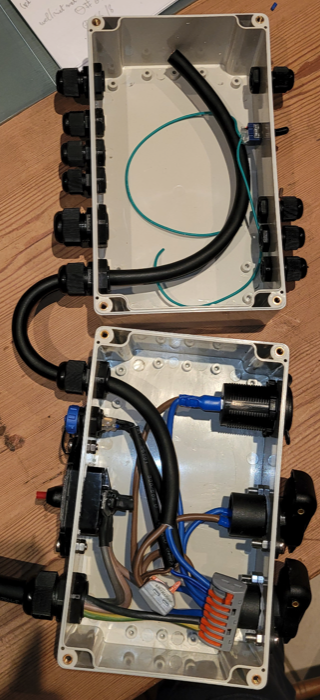
The 12V+ and GND are all the same I think. In the pictures you see an open box where big power enters straight from the battery with a fuse and interruptor and some peripheral power sockets among which a PD usb-c car charger for the tablet. A power line enters the second box on top where some permanent connections are made, e.g. a switchable 12V/24V motor supply and where the industrial connectors for the central unit leave the box (among which the power connector with 12V from the power line and for the motor driver 12V or 24V from a converter). Also leaving here are the A and B wires for the motor (and the actuator) of ± 2 meters.
I have a switch on pins 3-4 of J8 that shuts the central unit on/off independently of the tablet (see a previous post), regardless if it is connected with a usb-c cable to the tablet or not.
{kind=link}

looks good to me. The USB and the charger cable are close to each other and not next to the motor or main supply cable?