
2 Likes
To make things work, you must have 12v to pcb, AND an gps antenna, connected and outside the window. Then teensy can begin blinking orange.
I’m just starting to assemble my first AIO micro board.
I’m planning on Canbus connection so have added the 2 jumpers in the Danfoss area.
Bno needs soldering but do the 6 pins on the Teensy also need doing?
Any other advice appreciated.

You need the 6 pins. See why 2 posts above.
Above in this thread you can find info about which pins, but my link is to another thread.
In following link you can find a post about which type of pins.
2 Likes
that means until all the modules are connected the Lan wire won’t show up?
I believe the lan will show as soon as you connect the 6 pins.
1 Like

Just check the total hight/length.
Perhaps change the pins in plastic to something that fits.
1 Like
Now I understood about the 6 pin. I thought before that the LAN is already integrated in the rest of the pins.
Here is information about pin sizes.
https://www.pjrc.com/store/header_socket_3x2.html
Hi all,
I am having an issue with this board.
Teensy has been configured via usb.
Teensy 6 pin ethernet connected.
No lights on Teensy with board connected to 12v.
Cytron (24v) is intentionally not powered at the moment.
Gps receiver has been firmware updated and configuration file loaded using UBlox Ucenter.
GPS shows working in Ucenter. Antenna is connected.
Ethernet has been configured as per Farmer Brian guide-shows data send/receive
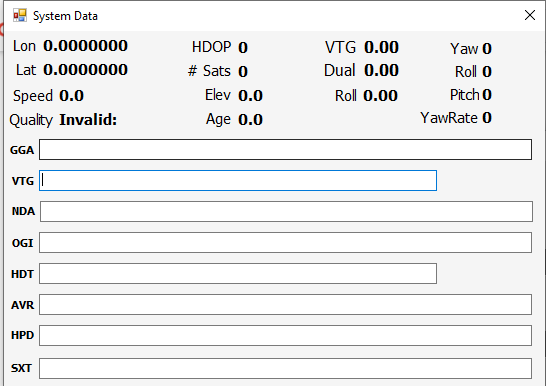
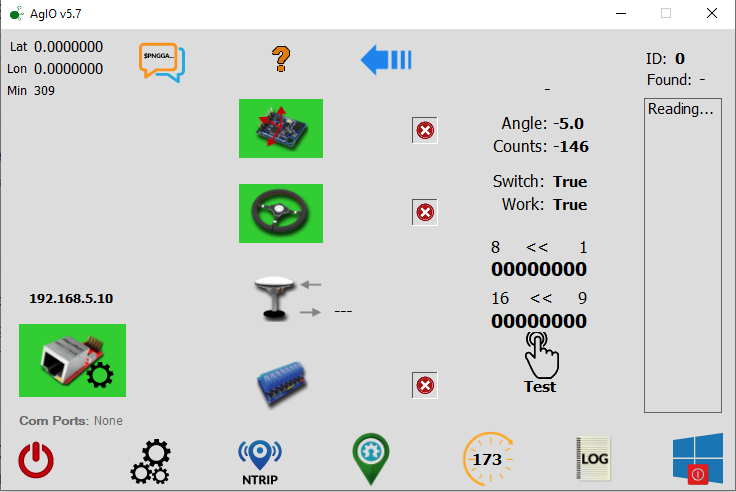
I have no GPS info when connected via ethernet cable to V4 AIO board.
Any help appreciated? I’m lost on a next step.
Screenshots attached.
Sorted.
The issue was that the F9P config had not actually stuck.
I discovered this by going U-center -view-messages view- ubx/mon/ver and it showed it was still on “boot” config.
Updating from that point failed numerous times until it finally worked. Took about 10 tries and leaving it even if the program went unresponsive. Might be the laptop Im using causing an issue.
With a ethernet to USB adaptor , is there any better performance using USB C or USB A? I can use either on my tablet but if USB C performs better than USB A for data movement I would go that route.
AOG doesn’t really send out huge amounts of data and I don’t think USB A would cause a bottleneck. I don’t think that you would really see a significant difference with either one.
could someone verify which jumpers get used in the AIO V4 micro board. my setup will use the baraki steering valves. does it need to have a jumper connecting the 2 pins for remote or pressure? is that for the disengage feature so if i use the psi sensor then id jumper the pressure pins, and then what about the 0-20ma pins do those need a jumper cap on them as well?
Are these question already answered anywhere? I’m also interested.
Mouser carries both the Honeywell RTY120LVEAX sensor which is used and talked about on this forum. They also carry a PIHER PSC360G2-F1A-C0011-ERA090-05K which you can buy different angle ranges which is about half the price of the Honeywell. Does anyone know if this sensor would work as well as the Honeywell. Looking at the spec I cannot see a difference. What are the main sensor characteristics needed when looking at different sensors? Thanks
Is i correct if i read its something wrong whit this wiring?
The pressure sensor does not get any voltage input on @baraki 's valve?
What voltage shoud i feed it with? 5V or 12V?

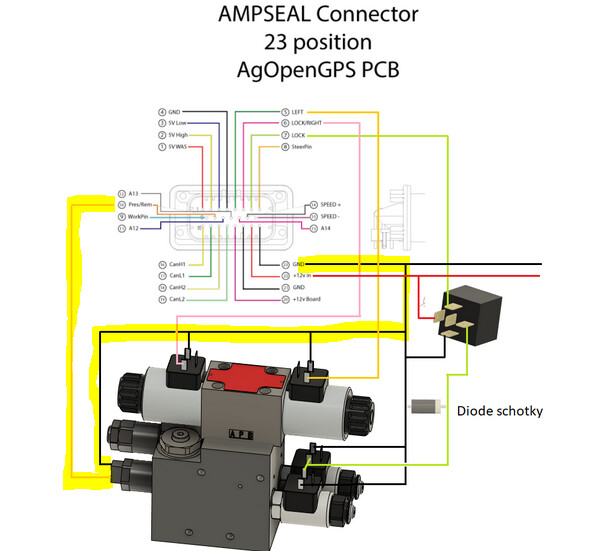
None of those.
You need to use remote, so connect 1 and 2.
That way the pressure switch on baraki valve connect the 5 V (at the optocoupler at top of your picture) to GND
Unless you have changed the pressure switch to another presure sensor?
1 Like
No. That explain how it shoud be connected
If there are more than 5V coming from the AWS to v4.1 Micro, are they simply ignored, or does the board die?
Hello, I’m a new noobie here, with a 4.1 std board. I am in the “bench testing phase” with all my components, I have now put everything together, following the wiki. I was quite surprised that it seems to be working, and I havent let out any magic smoke yet.
But I have two questions at this stage (probably more to come…):
1: The LED for GPS/RTK stays RED even though I am connected to Ntrip, and AOG says RTK fix. The F9P board blue LEDs are OFF for NO RTK and GPS FIX is blinking.
Is something wrong here? RTK seems to be connected and working but no green LED?
2: The LED for AS/ACT also stays red, but should this go green when stationary, in bench testing? I tried going to simulator mode but AOG says no simulator when GPS connected. Can autosteer be tested in simulator mode? (I am using cytron to steer with motor, works when using manual buttons in AOG). And do I have to remove the F9P board from the AIO board to get to simulator mode?