I need something that will work in a large field so around 5km range, im going to be hooking this up to something that will project a line so it has to be near accurate and update frequently im thinking at least 15 times per second
I’m leaning towards an ardusimple since they are fairly cheap and claim good specs, does anyone know about their quality and accuracy of their claims? or know of a good alternative?
Can you tell us a bit more about what you are trying to accomplish? Do you need some kind of turn-key GPS system? Are you going to build an AgOpenGPS system?
The Ardusimple is a circuit board that requires some wiring, an enclosure and an antenna. Depending on what you want to do there’s a complete, self-contained product called the Reach RS2, or a smaller unit like the Reach M2. And of course there’s the Agra-GPS CRG for a complete F9P-based globe that is John Deere compatible. It all just depends on what you need to do with it.
But to answer your question, yes if the base station is nearby, you can get 1cm relative accuracy with the Ardusimple board, and in fact with all modern RTK receivers. With a CORS network providing corrections, you can get 2cm accuracy, and that drops off the farther you are from the base station. And I believe the ZED-F9P used in the Ardusimple can indeed provide 15 hz fixes. Although I cannot see any reason to go over 10 hz. And chasing cm precision can be a bit of an illusion, especially when you consider that the bounce and sway of a tractor, combined with implement draft and general looseness of the machine might mean you’re only really accurate to within a few inches, which is pretty amazing still.
Without knowing what you want to do, it’s difficult to comment further on the suitability of any particular F9P-based product.
The cartoon robot looks very interesting. I think it would work if we made a text and image robot. Huge painting in open area. or text. It works for advertising companies, lovers
Have been running ardusimple rtk2b xlr base/ rover. Extremely satisfied. Even with our commercial rtk system we would get a narrow/ wide rows every once in awhile. Never had this issue with ardusimple and it’s about 1/15th of the cost of our commercial rtk. If using a mobile base, there’s an offset every time it is moved and re powered. So boundaries and previously applied are off a little. Best to set up permanent base, or ntrip.
I haven’t looked into agopengps enough to be 100% sure but if it is good for what im going to do then i’ll use it. if not i will have to develop my own software which i plan to a little bit anyway to achieve what im trying to do.
all our tractors have an auto steer system already on them which makes the tractor go straight, we are making a system that would know where the tree should be placed which is about 15ft apart so it gives time to predict where the next one is. I dont want to say exactly our plan but basically if it can accuratly know where it is relative to where the tree should go on the line which the tractor is driving then we should be fine.
the tractor is going perfectly straight + a mostly constant speed so it should be pretty easy to calculate with the help of a gps how far ahead the next tree should go and once it hits 0 it goes to the next tree which is x distance apart
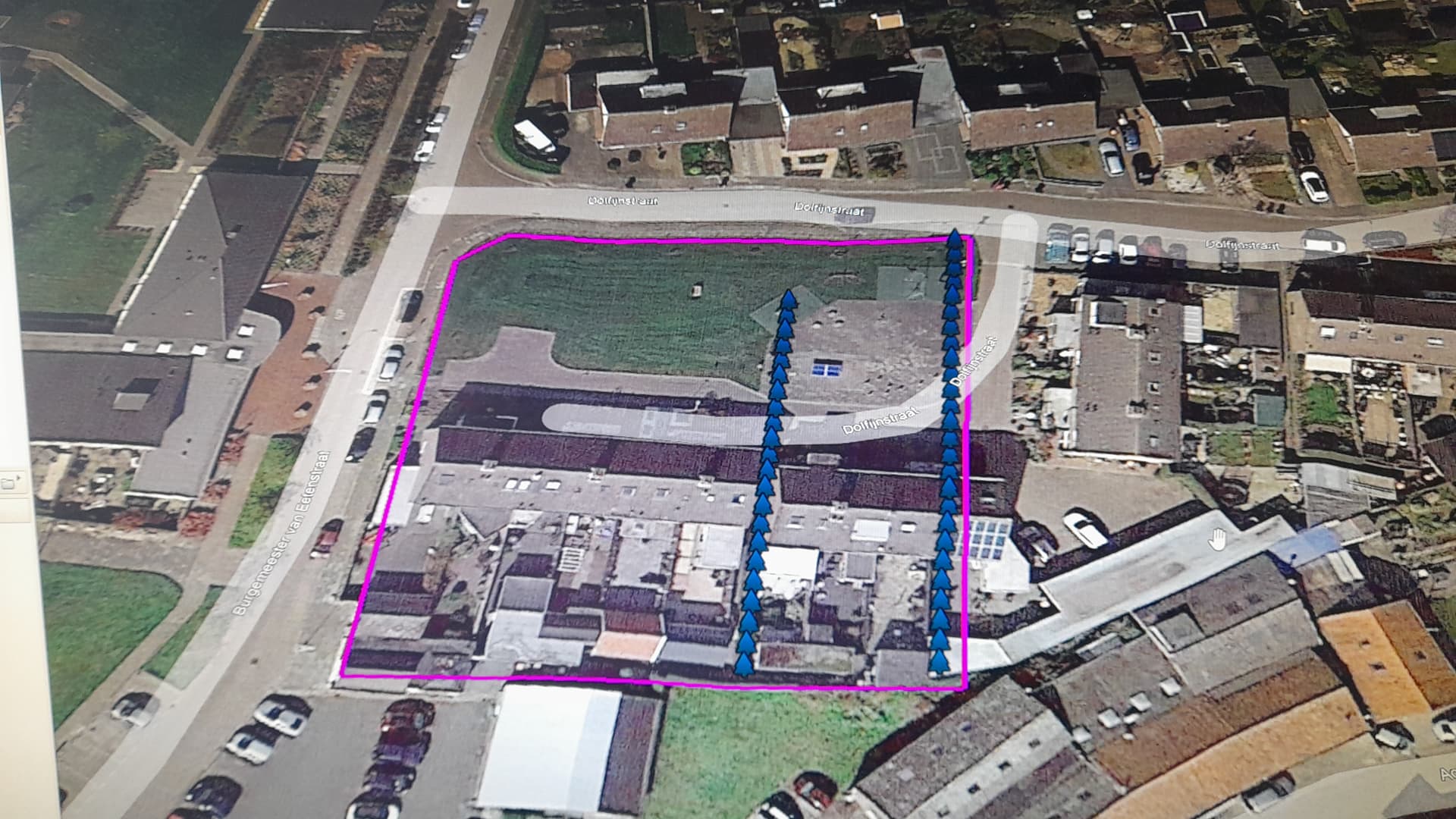
Basically the square is the tractor going about <5mph and the lines are where the trees would go and the gps system should be able to accurately know how far until the next line would go. which one again could probably mostly be done with basic math with speed but the gps would be a correction for it
Gotcha. So if we ignore GPS accuracy for a moment, 5 mph is roughly 7.3 ft per second. At 20 hz updates, that’s a new position every 4 inches or so. 10 hz would be just under 9 inches. And that’s not counting other factors like the time to mechanically move a marker. 20 hz is possible with the f9p.
If you are simply trying to mark the spot to plant the tree then perhaps a 5’ diameter wheel with a tree planting bar on the circumference towed behind the tractor is a low tech solution. This way you get the tree location marked and the hole for the sapling created at the same time.
should be fine since the tractor is mostly going the same speed the gps would only be used as a correction and there would be a computer extrapolating it’s position and should be fairly accurate i think
the trees get planted by someone on the back of the tractor i am hoping to build something that will assist the planter to accurately plant it in the correct spot. currently, there are cross marks in the field and the planter would plant on the intersection but sometimes it can be hard to see the line in bad conditions or if the line has partially been erased. hopefully if it is pretty accurate it can replace the line altogether. i have a few ideas how to use the gps data but that is irrelevant to this, first i need an accurate rtk system
Have you looked into the tree planner version that I made to do this? Just search tree planner and you will find a long thread about it. There is also a tree spacer branch on Brian’s Git hub that just plants along a line.
what exactly does that do? also i feel like we are getting off topic here. im not needing help with software or what it should control but rather i want to know if an ardusimple or any other rtk system which might be better will work for what im trying to do. if so i want to buy one and get to work soon
Use tree planter you can set distance between plants and it will mark it in the field and you can export it to a kml file. You can also use it to switch a relay or something.
There are many rtk providers. Most importantly is the quality of the antenna and how it is mounted. Typically the corrections come in every second. The f9p is typically set to 10 hz. The f9p is fairly limited to this 10 hz. The GPS will be more accurate than someone can feed the machine. It you need it more accurate than that, you will need to set a ramp up based on the distance to the tree. (A look ahead)
I guess RTK does have a limit to the rate it can produce on any receiver, since it takes time to make the observations and run the calculations.
The solution to overcoming the limit and increasing the rate is to use a kalman filter to fill in the missing GPS fixes. That’s what the kalman filter was designed to do, calculate intermediate positions based on 3d velocity and acceleration. It was first used on rocket guidance to estimate the rocket’s position.
Or maybe it need not be that complicated even. If the speed is constant, you can simply count milliseconds from the last fix until you get to the cm spot you need. When GPS comes in you update your estimated position. A poor-man’s kalman without any filtering.
Yes absolutely. Just not real productive if moving to multiple farms in one day. I hope to have one permanent, and repeat the broadcasted XLR radio to all our fields someday. You won’t be disappointed with ardusimple. Good luck. I don’t fully understand your operation. If I was to plant trees, I might try rigging a quick paint mark triggered off relay. Sounds like you have it figured out.
why not multiple locations? my auto steer can take about an hour first setting up the field and stuff but like would it take very long to set up with an ardusimple (would be doing it at the same time as the auto steer) but also might not even be required since it’s a straight line after all