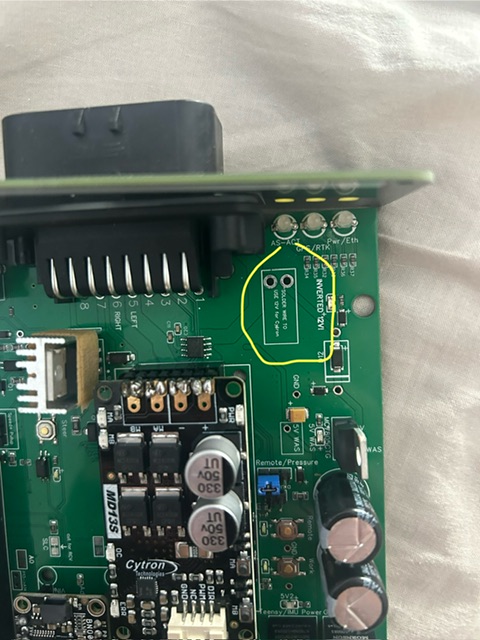
If you are supplying either 12 or 24 volts to pin 18 no need to solder that. That it used if you want to power the motor directly from the 12 volt board power. Supplying the motor from pin 18 like you were planning is a better idea either way.
When you get the board there is no continuity between those two holes.
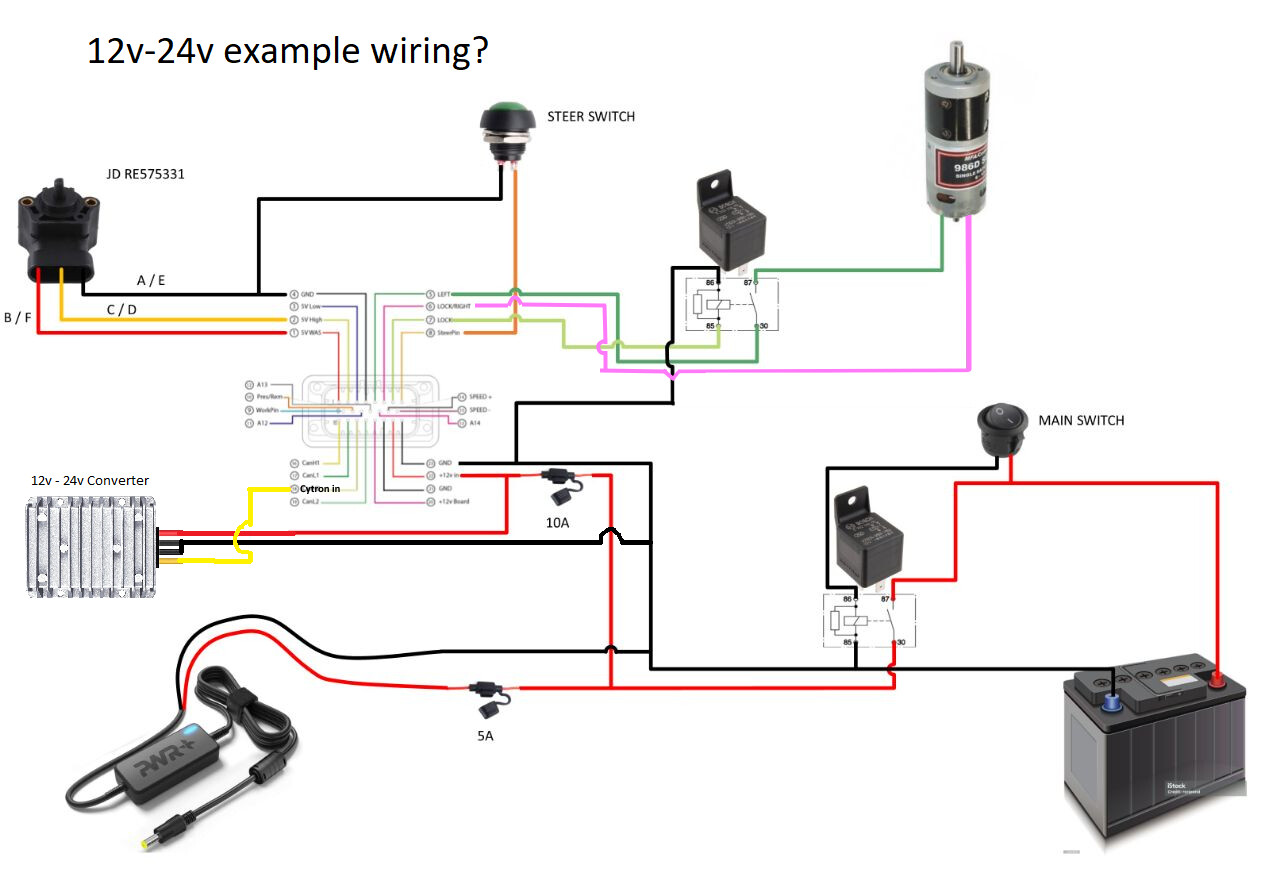
Oke, and if I want to use a 24v converter, + 24v output in pin 18, and where do i fit the - 24v output? Or did I not need the - 24v output and can cytron just stay connected to the - of the 12v battery on the board?
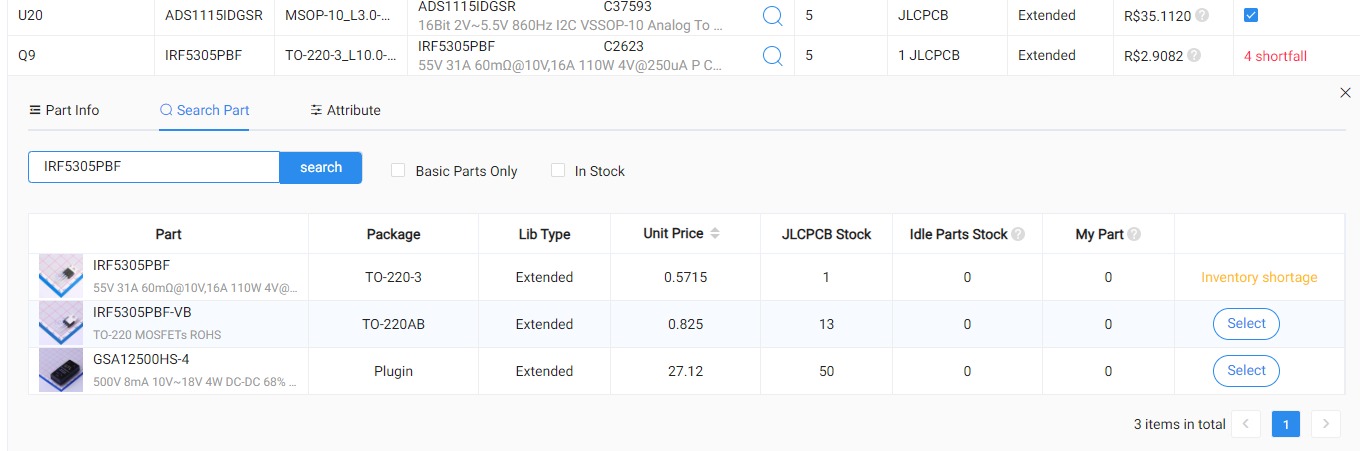
Hello, @m_elias, I want to order my v4.5 std PCB, but the mosfet is missing:
IRF5305PBF, and the JLCPCB is suggesting:
IRF5305PBF-VB, can it be used without problems?
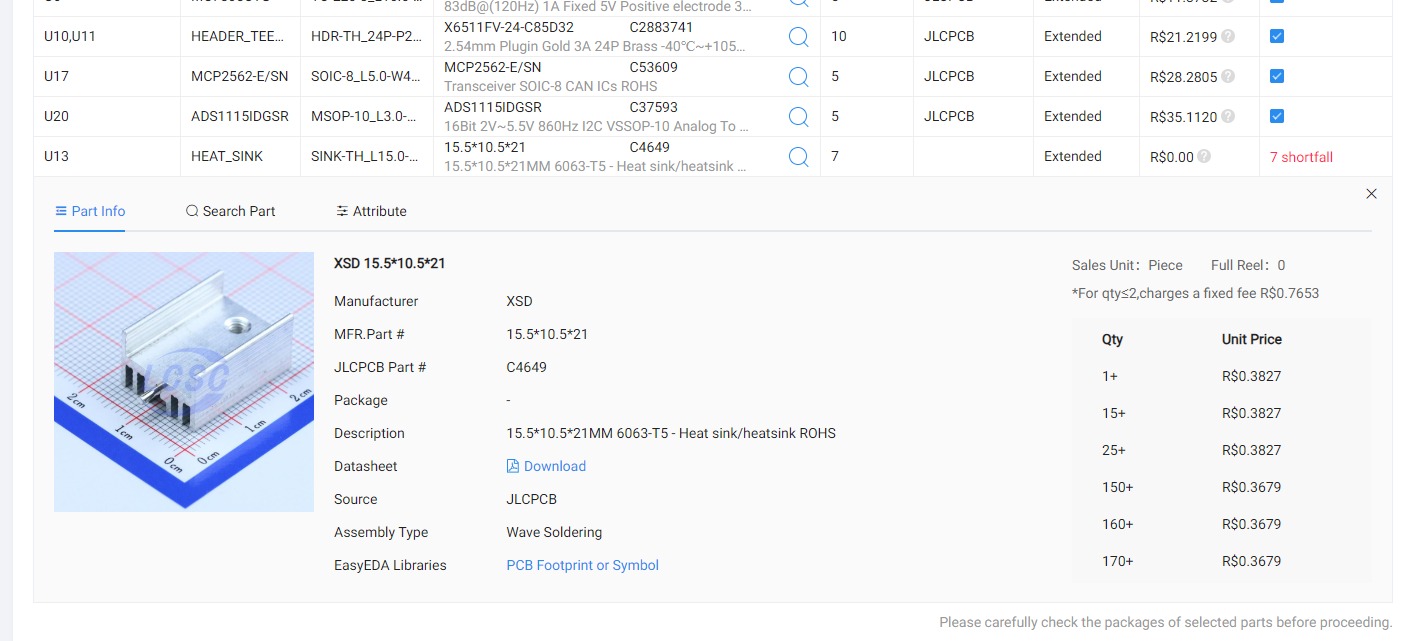
The heatsink for the mosfet is also missing, is there a replacement on the website?
And on the PCB part, do I leave everything default, or do I have to select something different?
Hello, I have a problem with the autosteering module, I would like to have a button to activate the section, but at this stage I do not need autosteering, I am using the system for testing and visualization of the tractor in the field, so I do not have a citron and a steering sensor, when I soldered the power converters for the “L780SCV” steering sensor at the beginning of assembling the PCB, I encountered a problem that the wheels were turned in the program, I could not reset them in the program to make them straight I vomited the converters, but the autoster still turns on, the WAS power supply diode is lit green with a weak light, the output voltage is about 2.12 V, probably because the diode light is weak and the program still shows that the wheels are turned.
How to solve the problem of having a section switch but at the same time turning off the steering sensor so that the wheels are straight ?
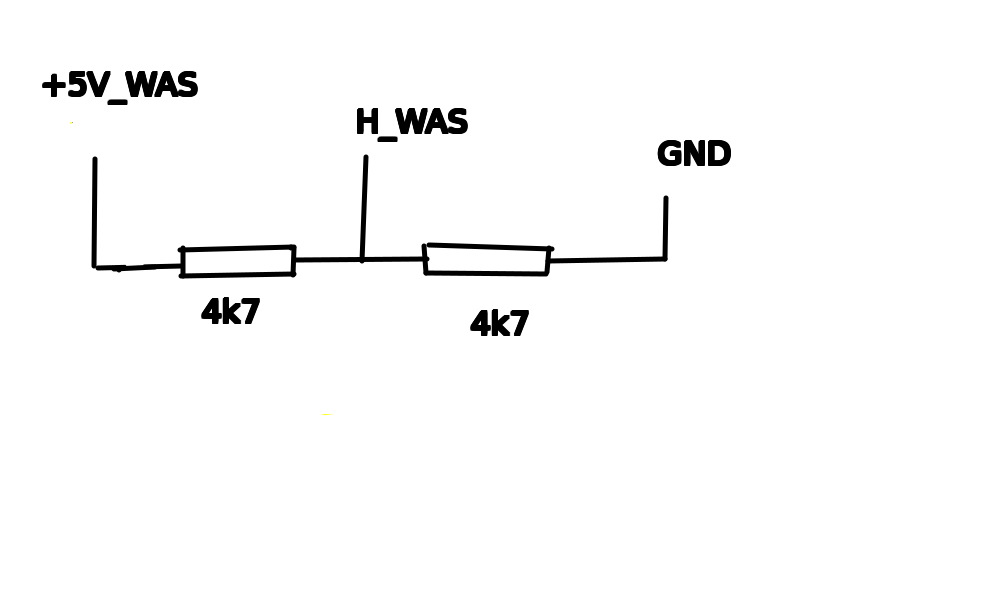
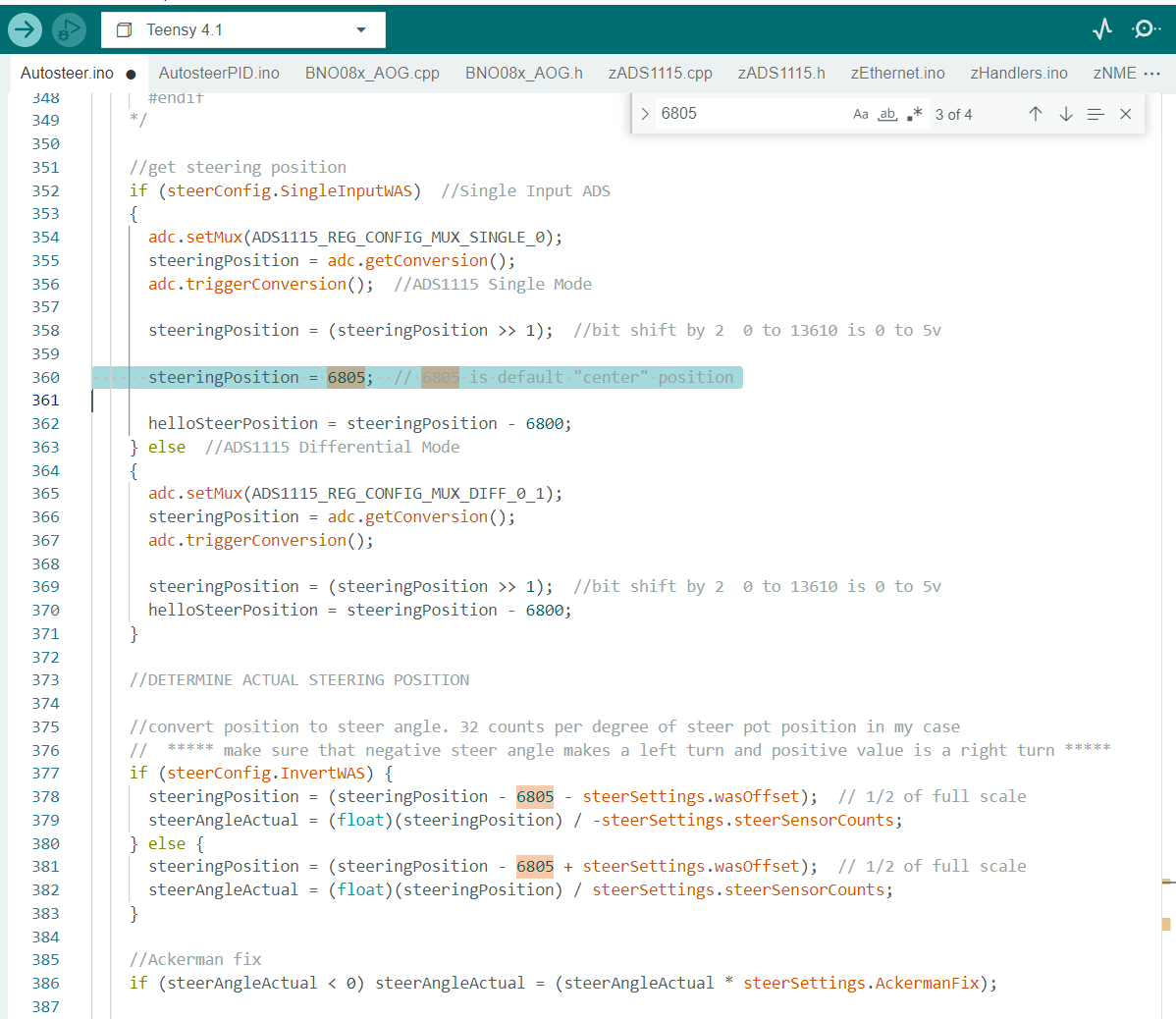
You are missing the WAS 5V regulator. If all you want to do is send AOG continuous fake WAS center data, I would do that in the firmware. But electrically, you need to use a 1:1 voltage divider from 5v or about 1:2 from 3.3v.
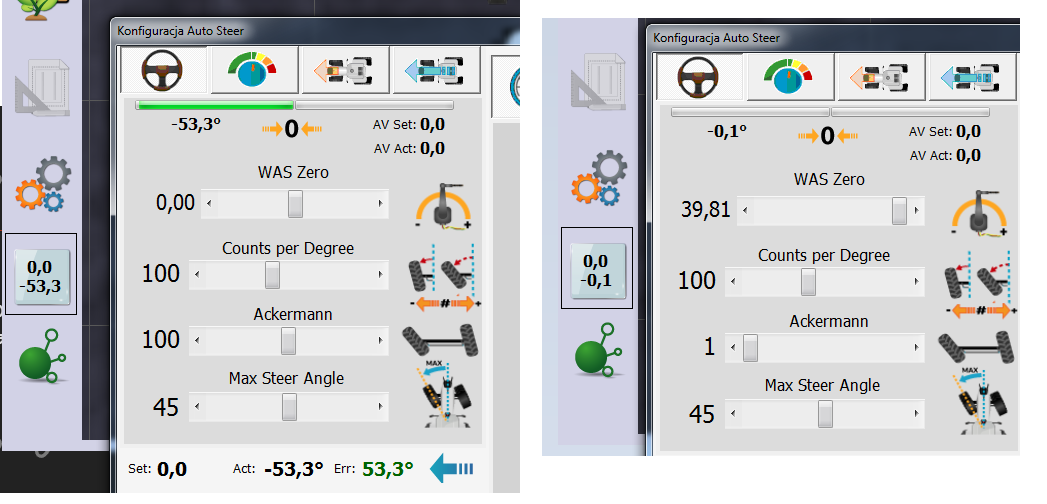
soo solder a power regulator for WAS, what should I do in the software in the sketch from Teensi or maybe in the setting of steering sensor I managed to set the steering angle sensor to -0.1 in the settings WAS zero to the right and Ackerman to the left the reading is not completely zero, can it be done differently?
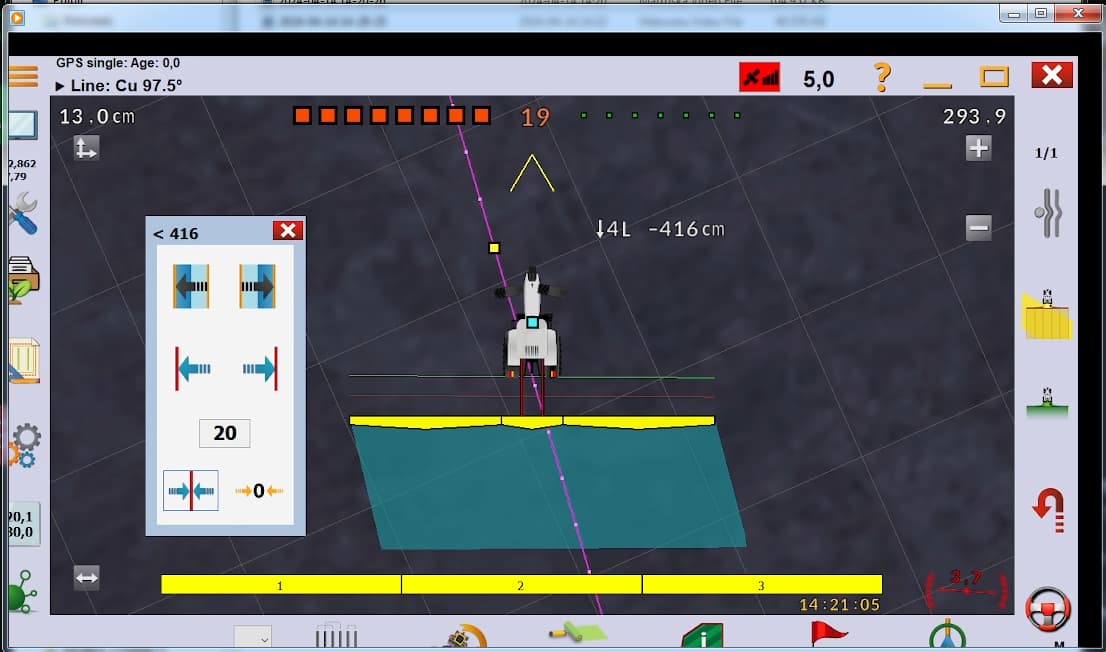
I made two boards for myself and a neighbor. I encountered a problem - the tractor was driving sideways. BNO08 was set, corrected and configured, but it was still visible that the tractor was driving sideways. At the same time, my tractor had the same configured board without the autosteering module turned on. It worked normally. The differences between these boards were with autoster turned on, the wheels were turned 60 degrees to the left, I came to the conclusion that the problem may be the turned wheels, that the program thinks that the tractor is turning when in fact it is going straight
You solve problem?
If not , do you have identical setting on booth GPS receiver?
Same problem on mine one boards , tractor was driving sideways, no WAS problem , WAS working correct, problem was in wrong program in GPS receiver, I don’t now way.
I have RTK correction via Xbee and android lefebure NTRIP client.
It is very possible the wheel angle causes your problem. AOG has a turning factor built in based off the wheel angle that adjusts the heading as you turn.
it works properly, you can see it in the video, and it was probably the fault of the fact that in the Teensy program there was no line of code responsible for the neutral setting as you linked earlier and the program simply thought that the PCB was sending it information that the wheels were turned
My final question is how can I turn off the control module in the Teensy code so that only GPS and IMU are turned on?