Okay thanks for all the help and advice, I will probably use the tablet button to get setup and started then look into getting the armrest button working in the winter when I have a bit more time.
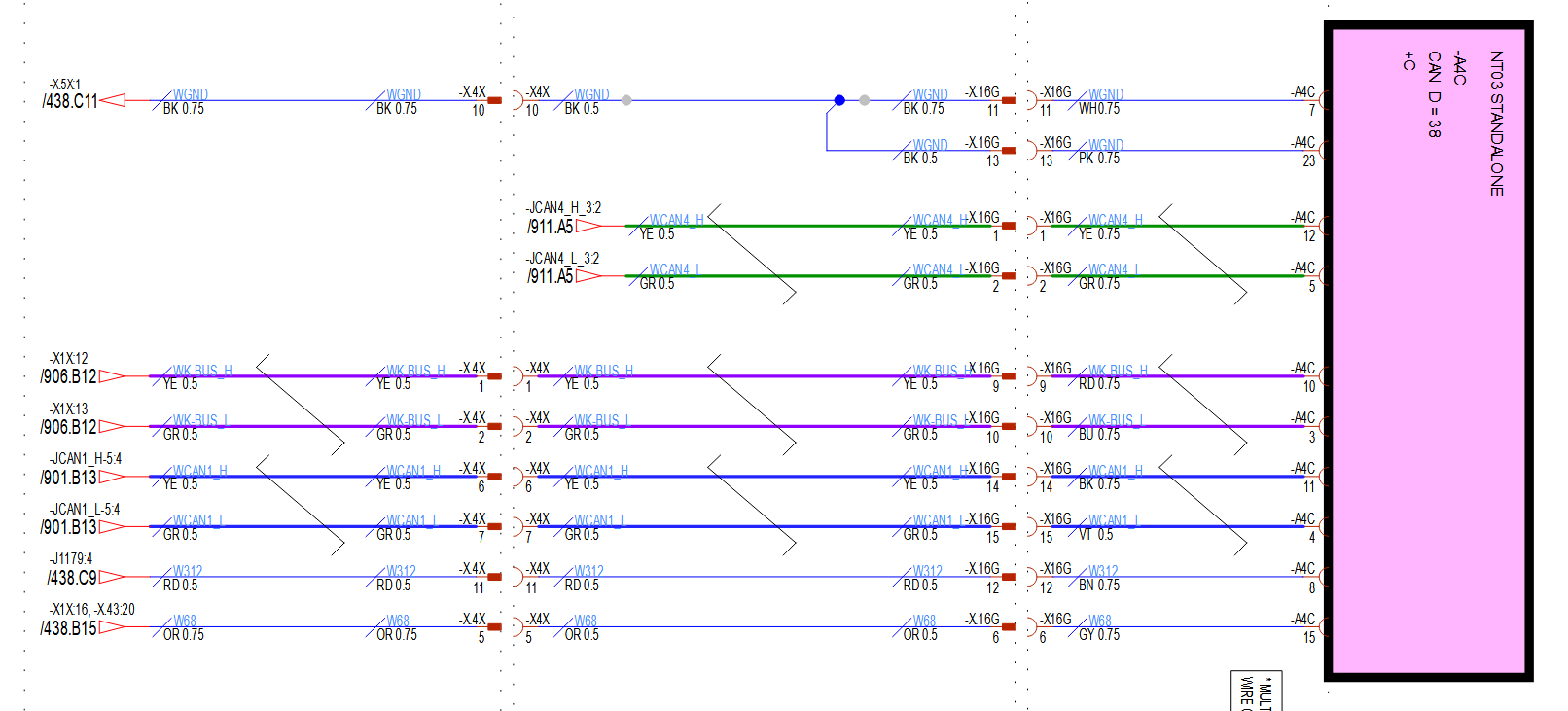
Out at the dealers today, we got nowhere with this. Tried all 3 buses on x16g, especially wkbus, and no steer codes to match the INO at all. Even using the flow view in savvycan, nothing looked like a WAS. This was with the valve engaged BTW, and even with it steering in the factory SBAS autosteer.
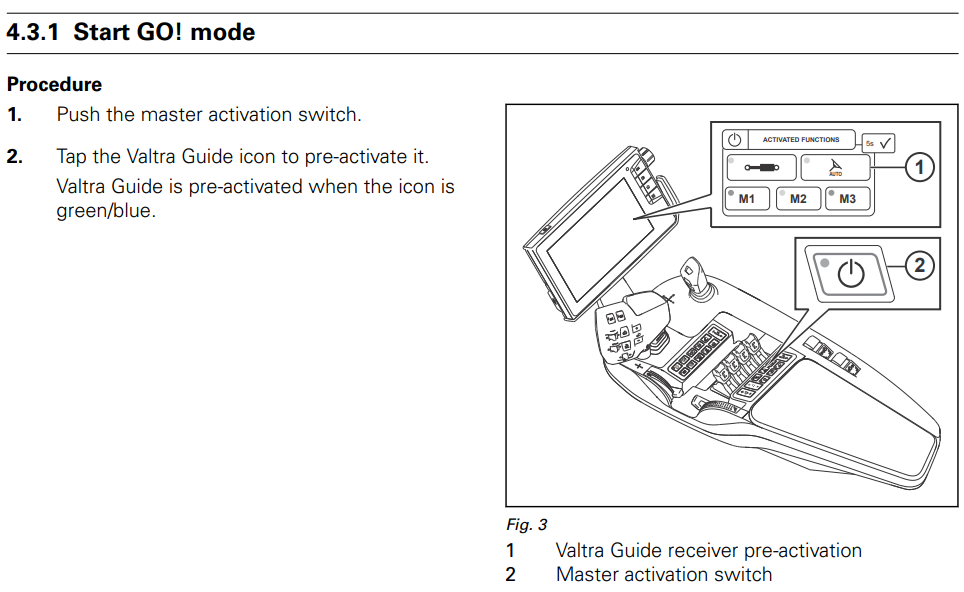
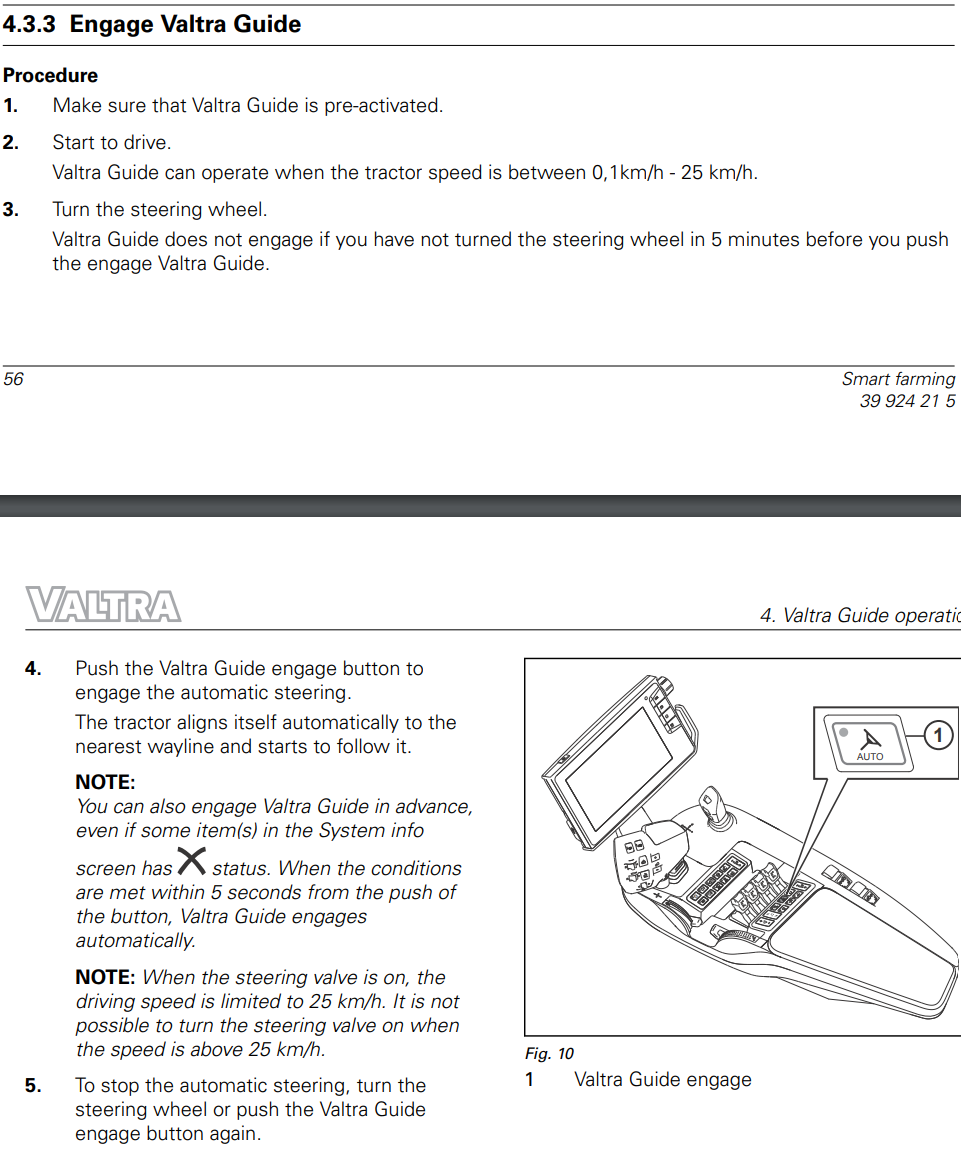
Thanks, we did pretty much the same. The one I was in was the one with all the screens, command joystick, etc. The steer valve, I believe, is enabled on the arm and this brings up a screenshot full of options, one of which us a steer box you have to tick, and autosteer-engage button is beside it. As this one was steer equipped, there’s an auto-steer option on the monitor too that brings up your fields etc but I presume that wouldn’t be there unless unlocked.
So, it had all the toys, but no sign of the AC/AD drive codes. Full captures at the link above. Going to try a T.175 tmrw to see if thats any different.
Hello,
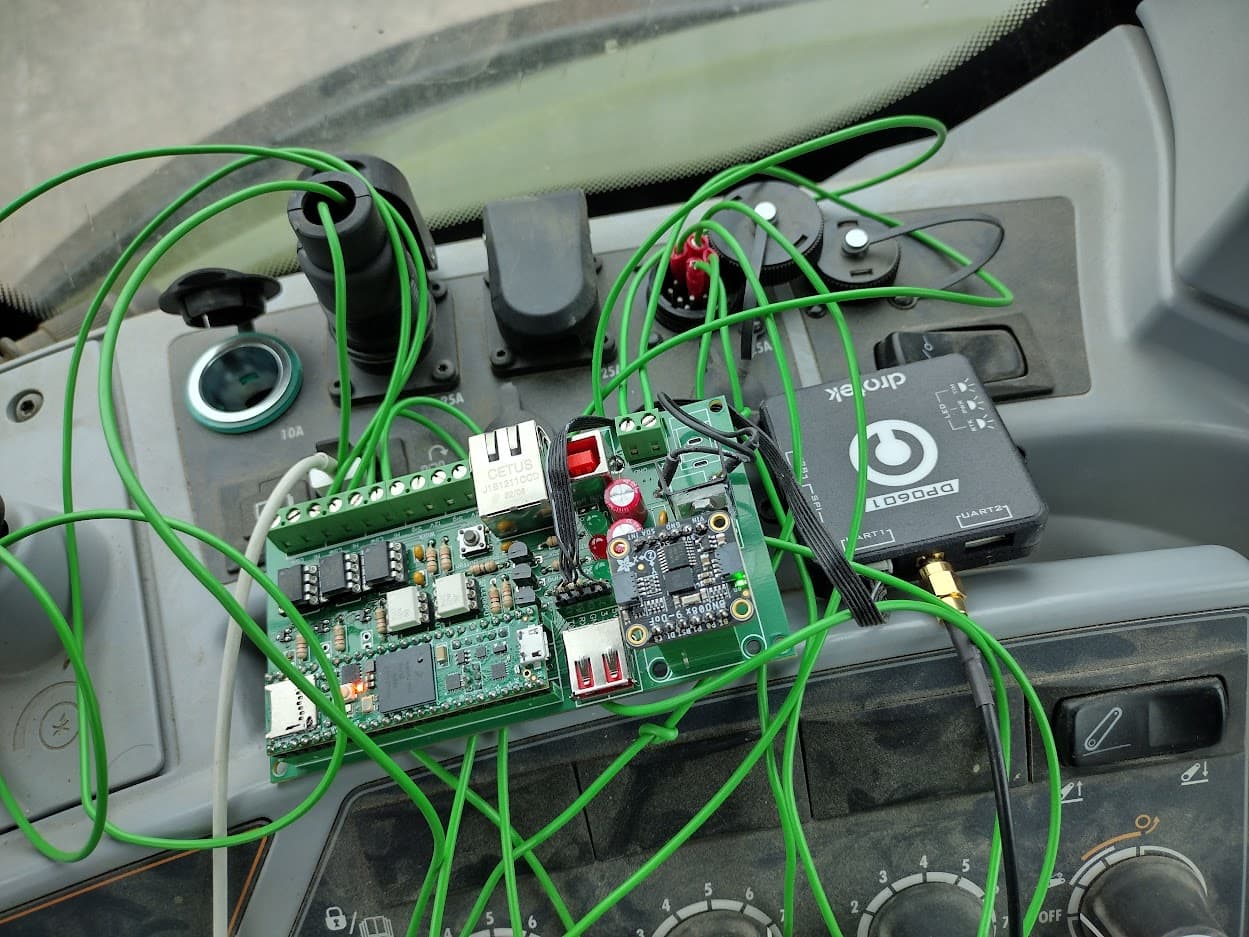
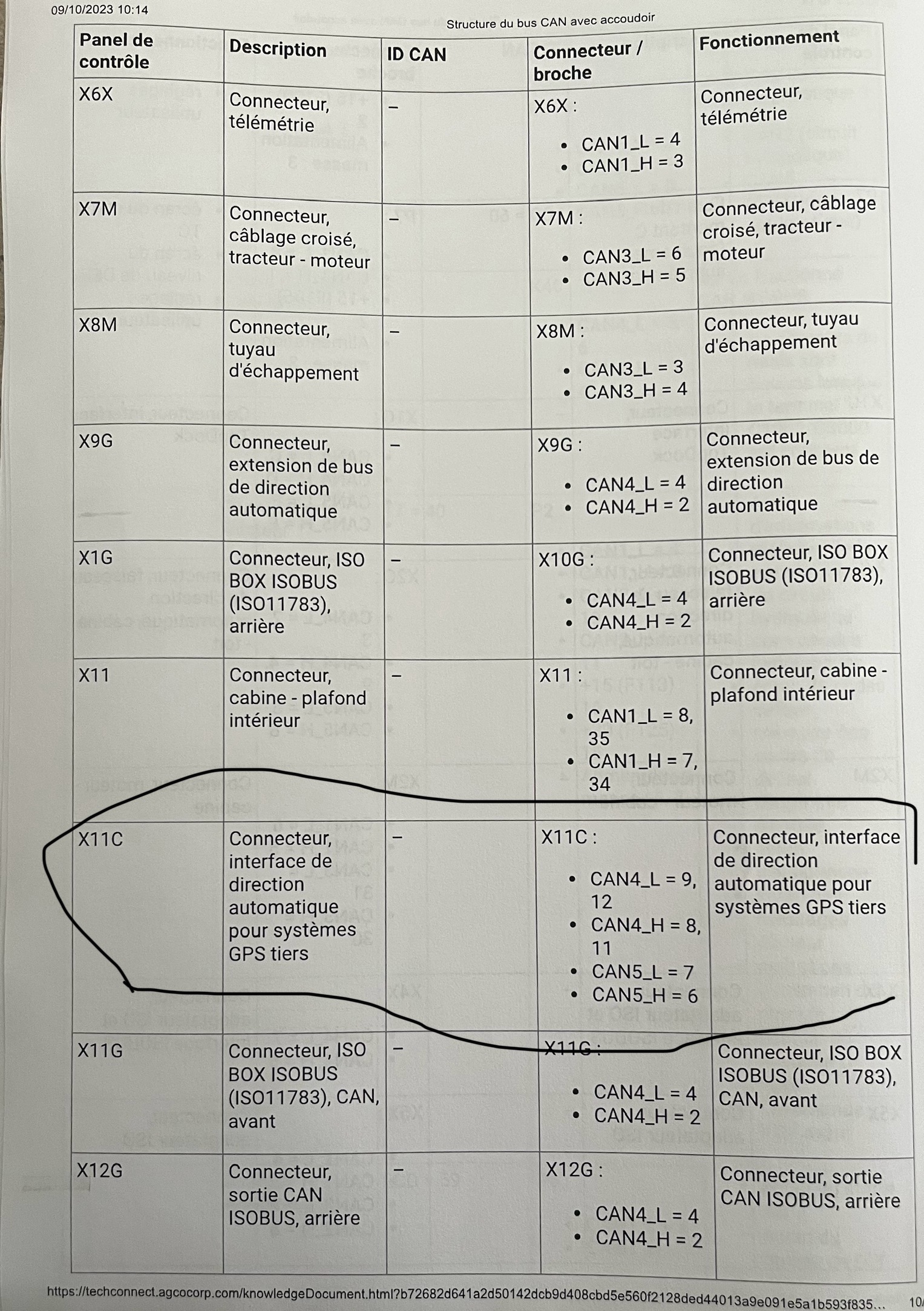
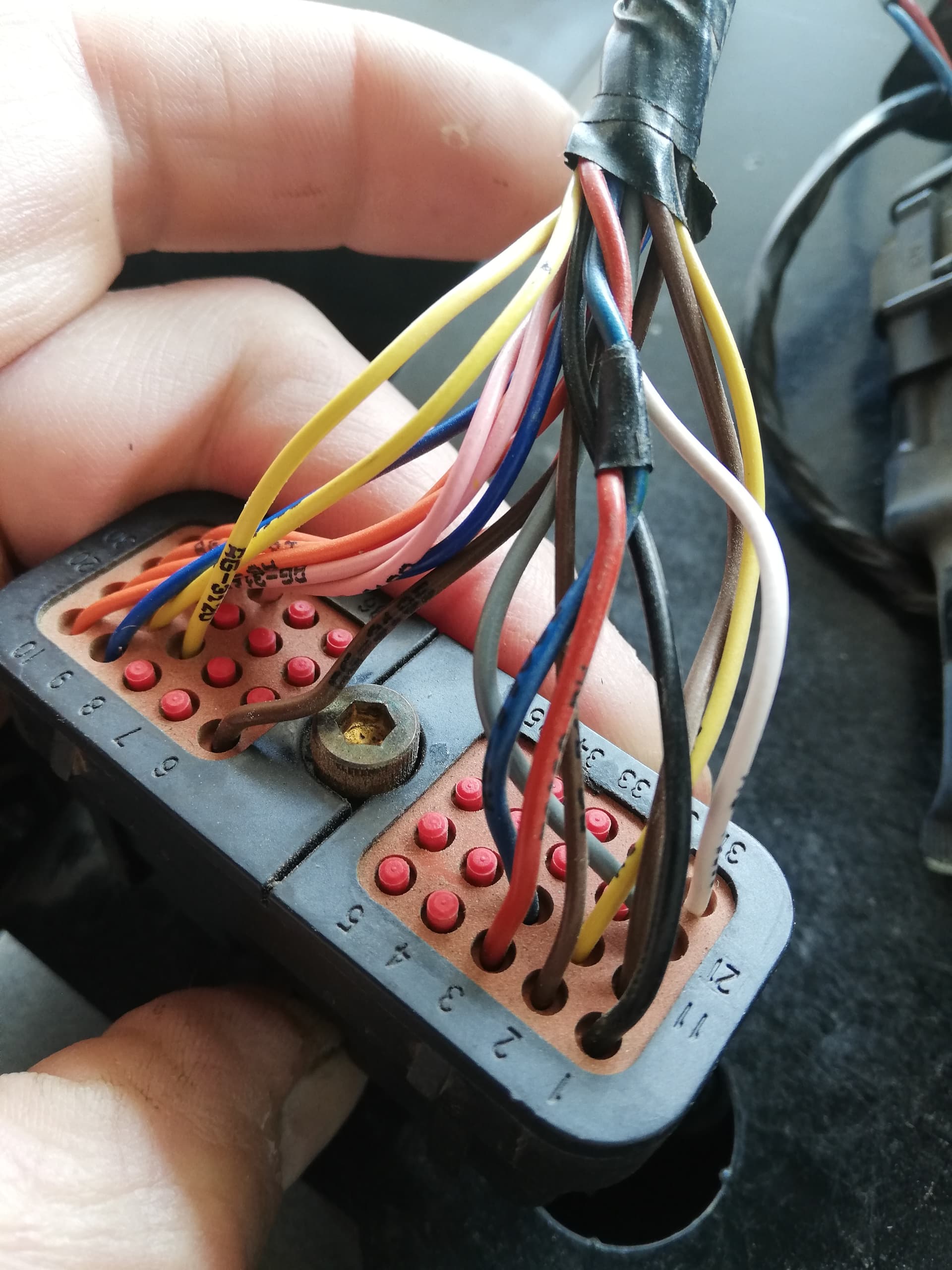
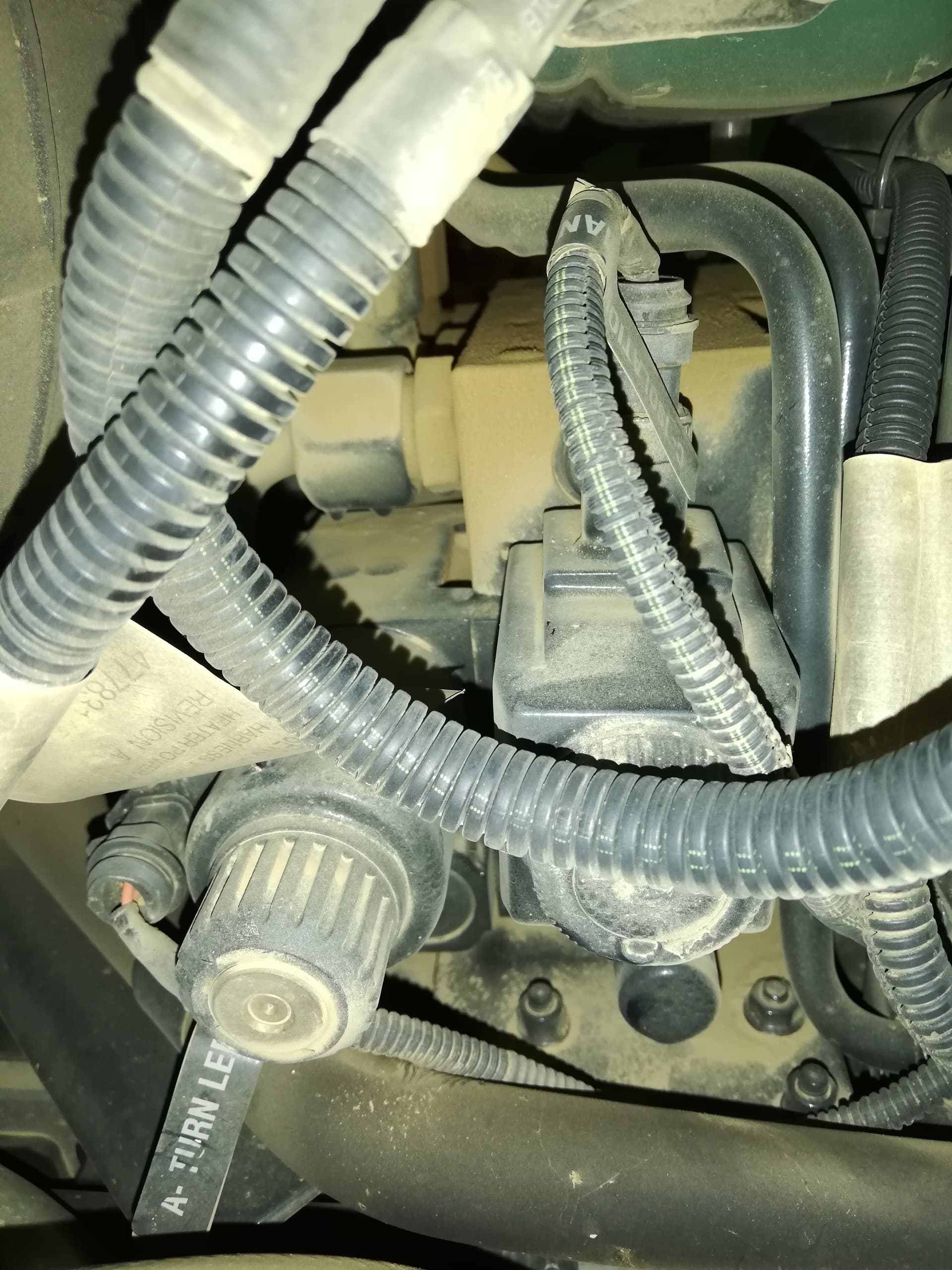
I would like to equip a maxxum case from 2017 with agopengps. here are some photos of the steering solenoid valve and connectors.
Do you think I can do a canbus assembly?
Hello,
I would like to know if it is possible to connect AgOpenGPS via CanBus on 2 Tractors which are not autosteer ready : New Holland TG285 (2003) and Claas (or Caterpillar) Challenger 55 (1998). I have the electrical schemas but can’t easily find if the steering and related hydraulic valves could be piloted via CanBus.
Has it been done already by some here (and if yes, how) ? Do you think it is feasible before I try looking into CAN data to find out ?
Thanks
Thanks for the reply. I can confirm both models have a CanBus (can be seen on their Electrical Schemas + I changed the CanBus terminators on one of them), but question is if it can pilot the steering and/or the valves directly. Thanks.
Yes on the TG285, there is hydraulic valves.
For the Challenger 55 it is another topic as it is a tracked tractor, so it needs to pilot the differential steering inputs to manage the tracks speed as the steering wheel does.
This is why I think, for both tractors, that just piloting steering inputs from the CanBus would be the simplest approach, to just mimic what the steering wheel does.