Where did you end up getting with this? I have a Case Steiger 485 HD 2008 model, looks like it has a similar analogue valve onboard… I was hoping to control it via CAN, but if I could find a wiring diagram to connect direct to the valve I’ll happily just do that instead!
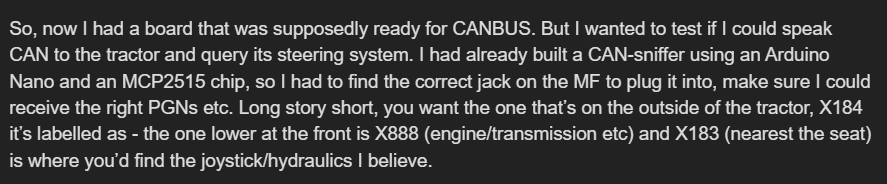
At a 2017 MF 7720 today, found the steering on the lower plug, X888 and the joystick (headland management button) reporting on 0x210[1] & 0x20. Didn’t get the connector number of the port, but it’s the one in the pair next to fender.
At a 2016 Valtra S374 today.
Quicksteer works.
Not sure which CAN should I connect myself to. Theoretically this doesn’t yet need 3rd party steering but being the 2nd ever tractor of mine I’d use some guidance. These are the connectors I found:

1 Like
Deal responded for Valtra S4 series:
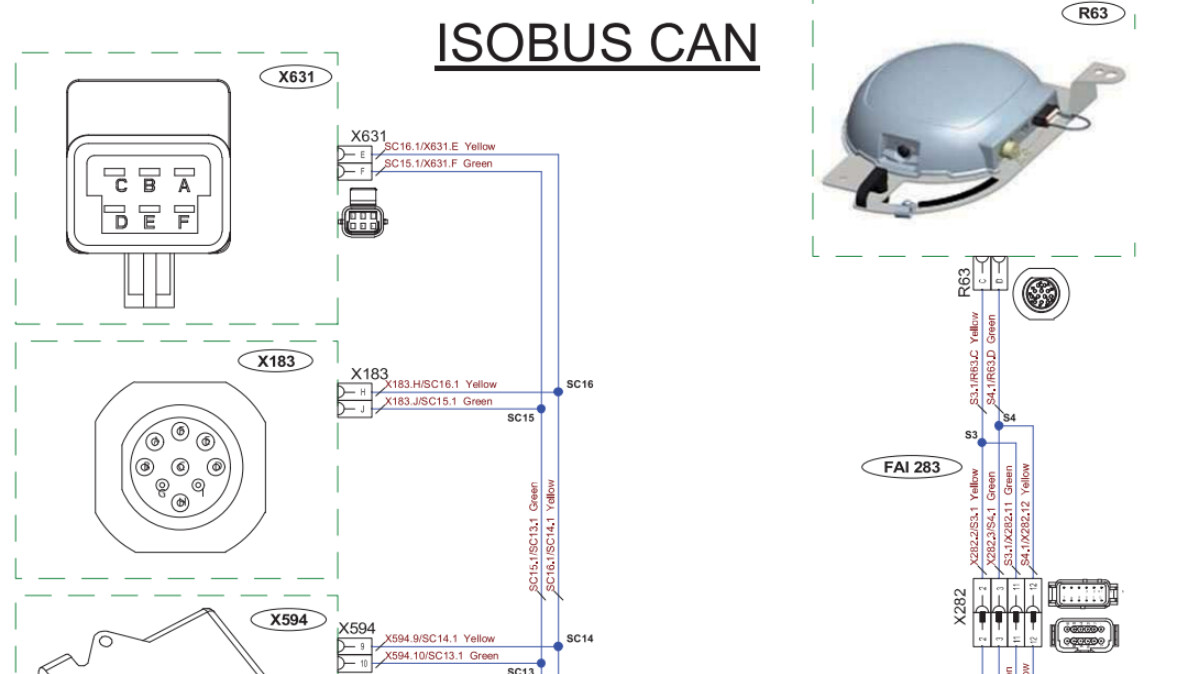
ISOBUS:
Motor:
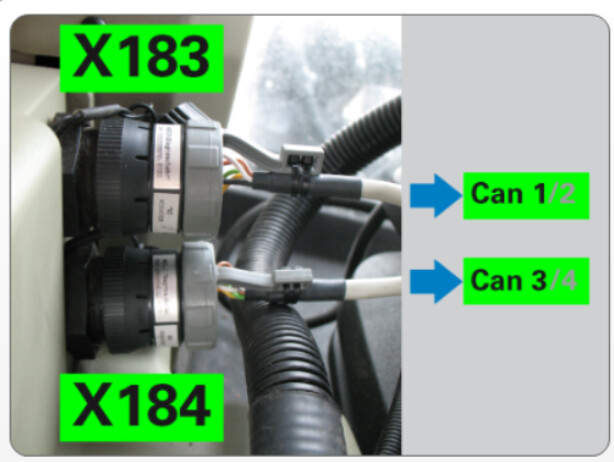
So top connector:
X183 H → CAN2 H
X183 J → CAN2 L
bottom connector:
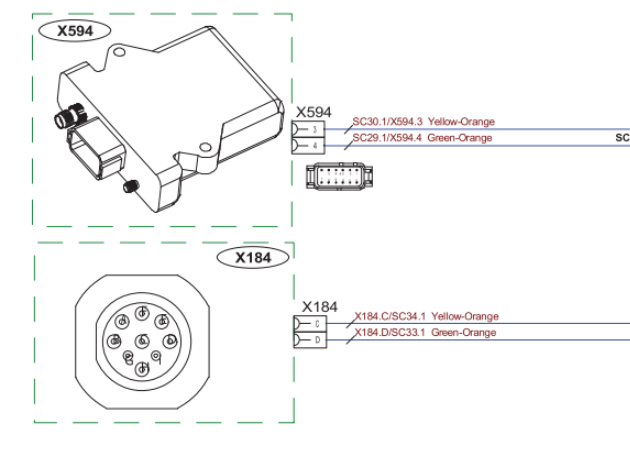
X184 C → CAN3 H
X184 D → CAN3 L
Then start up the machine and it should work out of the box?
2 Likes
Good old agco! From my 6718S adventures… sounds like you’ll most-likely find it on X184 (pins C and D)
1 Like
Hello,
I am currently testing the Canbus PCB I assembled.
I would like to get the GPS position sent on the ISOBUS as NMEA 2000 to my CCI 50 Isobus Terminal for Section Control. Because the PCB is connected to the Isobus anyway, with that I could get rid of the additional RS232 cable I use at the moment to get it as NMEA 0183 to the CCI.
As far as I understand it the recent Teensy Code for @CommonRail 's PCB has the code for that implemented. ![]()
But the problem is now:
When I view the Canbus the CAN 2 is just sending one initial message when I power the board up and after that nothing else is going on. I have SavvyCan connected via MeatPi and with everything running I don’t get any other data shown that is sent on CAN2.
Is there some special condition that I need to follow before that works or could that have an other reason?
I tested it with SimpleRTK2b connected and AgopenGPS running but wasn’t moving the antenna/tractor.
Maybe you’ve got some hints for me!
Thanks!
That was very experimental sending GPS to the ISOBUS. I was using a modified version on AgOpen to send the corrected position back to the teensy who then would assemble about 5 CAN messages to send the data to the CAN.
I personally just use a RS232 converter when using AgOpen and a separate ISOBUS terminal.
If you wanted to experiment you would have to use the modified version of an older AgOpen (I think it’s still on my GitHub with the Teensy code?) and in the Teensy ino before loading there is most likely something like “send GPS to ISOBUS = false” that needs setting to true.
It could be modified read the GPS data and save the numbers to work with (currently the Teensy’s just copy/paste GPS data they don’t actually read numbers to work with) and then send that uncorrected data via CAN.
In my opinion a simple RS232 cable is a simple reliable setup tho.
Ok, thank you for the explanation!![]()
That would be worth a test!![]()
But all in all that sounds like I will be going on using my existing setup!
Indeed that proved to be simple and reliable!
Is that directly nmea out from f9p to max232 and rs232 you mean?
Yes, that’s what I’m using.![]()
I made some progress on the Valtra S374 4th gen.
Bottom connector CD works.
Tractor does steer when I use a separate engage button. (Sometimes it only engages when I turn the wheel but after a successful engage it works flawless.) Armrest button does nothing.
Having the quicksteer also makes it weird as when we enable that it seems to disable AOG and I have to fight a bit with engage.
Suspended cab also malfunctions big time, so the antenna and IMU seems to live its own life. Placing the antenna to the hood helped a ton.
We’ll try to place the IMU on top of hydraulics tomorrow and see.
Does IMU X-Y selector work as expected? What shall be the orientation of Tony’s CAN board?
Motor settings Andy said only maxpwm does anything but I didn’t see a noticeable difference there.
WAS jumps 0.2 degrees stationary which is weird.
Slowly turning the wheel makes the was signal jump the other direction 2 degrees then it normalizes.
CPD I calculated to 25 such low values are expected?
Ackermann was around 110.
WAS 0 was bang on.
Any tips tricks for a more successful run tomorrow?
1 Like
Sleep? ![]()
![]()
![]()
2 Likes
pgain can be tweaked as well minpwm is hard-coded in the INO at 1 and Ackerman is always 100 for CANBUS as the steer controller handles that. CPD can be very low for CANBUS, I’ve found.
As I said in pm tho, you might have to get the WAS calibrated and yes, XY works as usual.
IMU to the front of the cab.
Antenna on the hood.
Works really well:

Thanks everyone.
2 Likes
I am installing navigation for a Fendt 922 2009, I use the all in one disc. connects 1 line to vbus. the sensor reads you but it doesn’t want to turn on the block (a few days ago it connected and turned normally) I’m running out of ideas what could have happened, the tractor doesn’t show any errors. the diode on the right side of the gun steering wheel changes from flashing to constant. Is there any way to check the block to see if it is breaking something? maybe the tractor is blocking and cannot connect the block?
Went over to see a 6125R Deere yesterday, has all the autosteer gear in, steering controller is called XSC in this one and it’s on the tractor bus running at 500 kbps. Even the steering controller address is 0x13. As I understand, this should be an ISO-steer ready machine from Deere, but my knowledge on the green ones is quite limited.
Found some Raven documentation online which states:
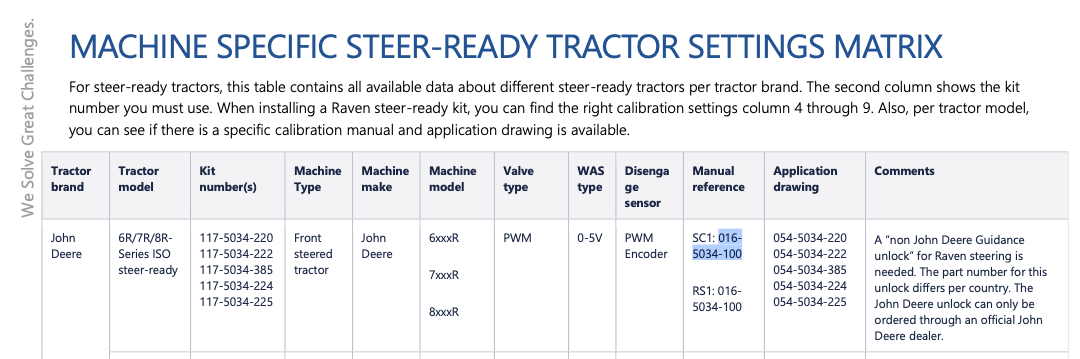
So I guess the ISO steer functionality is disabled, unless you purchase the Deere unlock for 3rd party guidance? Anyone got any experience on this? The valve itself sits under the right side of the cab and just has analogue PWM heads so sure you could just hook up into sensor and control the valve directly, sort of stupid as the hardware is already in the machine.
Should the unlocks be showing somewhere on the terminal? NOw the screen was empty where you can give the unlock codes, the machine is 2nd hand so no knowledge whether the autotrac has ever been used or not. I guess with a JD system it doesn’t need any unlocks for that matter. Might just give it a go trying to read the messages from the CAN.
Hello,
does anybody tried to run Kubota M7 on Agopengps CAN?
I have M7152 autosteer tractor. It’s handled by Trimble GFX-750 CAN mode.
Would like to check if it’s possible to run Agopengps in can mode in this tractor.
Any experience with Kubota?
Good luck getting anything JD to work with CAN - I’ve an ATU200 here I’ve been playing with and can make it turn, but not with any level of control over duration and speed. Would be great if JD could be worked out !
Hello,
Now that I’ve got the Canbus PCB working properly I’m thinking of integrating an automatic position control for the front linkage of my tractor. ![]()
Since it has a canbus sensor for front hitch height mounted from factory which isn’t used by anything, I would like the Teensy to watch the sensor data and automatically raise and lower the front hitch to previously set positions. The front linkage is moving via a canbus spool valve. I want to control that function via two unused Canbus buttons on the joystick, one for upper position and one for lower position. I did already find the corresponding signals for sensor data, spool valve control lever and the two buttons on the main tractor Canbus.
My question is now:
Did anyone try something similar before? How could I integrate this into the existing code for @CommonRail 's Teensy PCB or is that even possible?
I highly appreciate all your thoughts on that!
Totally possible - at a high level:
- add the appropriate bus filter to the CANBUS setup for the buttons you want
- write the code to watch for the button press in the correct (bus)_receive method and set an “in movement” state
- within the main loop, check for that state and raise or lower until the height is matched, depending on instruction received
You also have to think about how you’re going to communicate or set those heights from AOG, hard-coding it direct into the INO probably not the best idea