I have followed steps 1 to 4 without encountering any issues. However, when I connected the CAN bus shield to the tractor (Massey Ferguson 7624, year 2012), the engine briefly revved up to 890 RPM and then immediately returned to idle. Unfortunately, the wheels are not turning as expected.
Additionally, error messages are being displayed on the tractor’s dashboard as soon as I plug in the CAN bus shield.
I would appreciate any guidance on what changes or adjustments I can make in this situation.
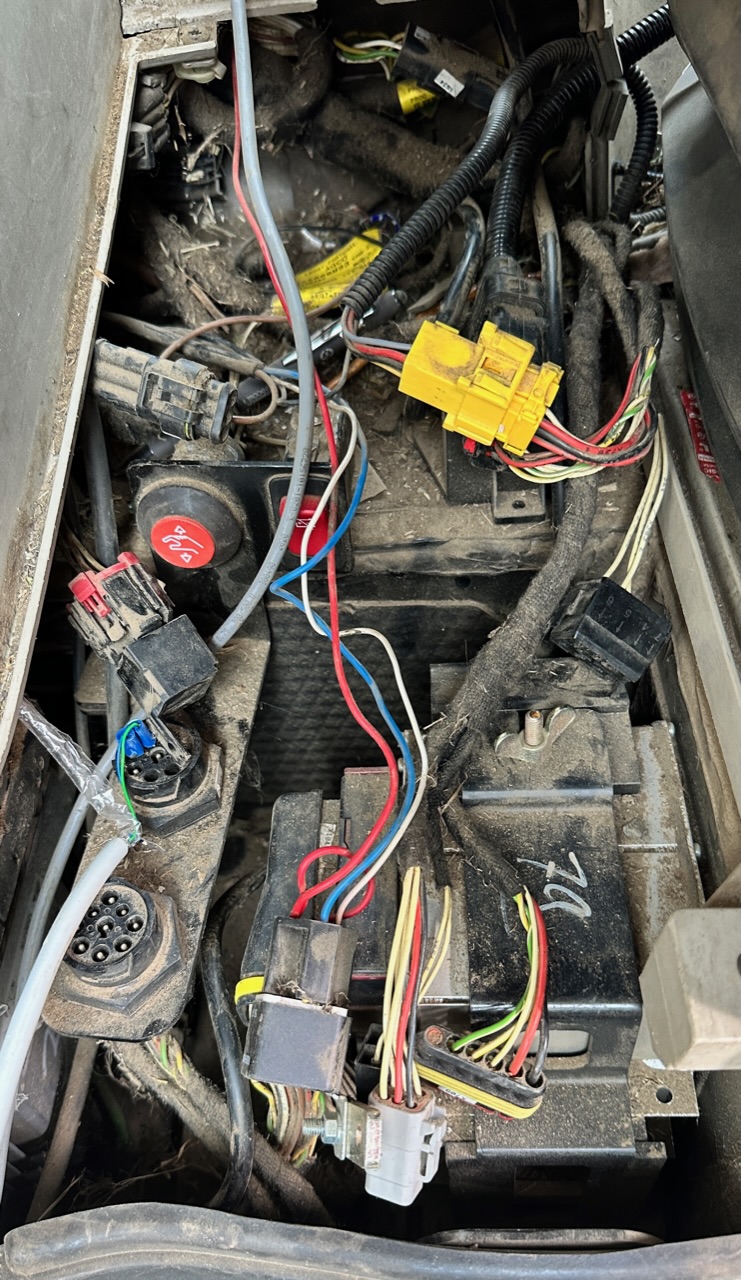
I found the X230 plug. It was under the X184 plug (the round one from the previous picture where my cable was connected).
I can receive data from the tractor CAN bus with the ‘Read_All_Can_Messages.ino’ code.
However, if I flash the ‘Valtra_Tractor_Simulator_Engage.ino’ or the ‘Massey_Working_Code_V2.ino’ again, the tractor still only responds to the RPM (it increases and decreases).
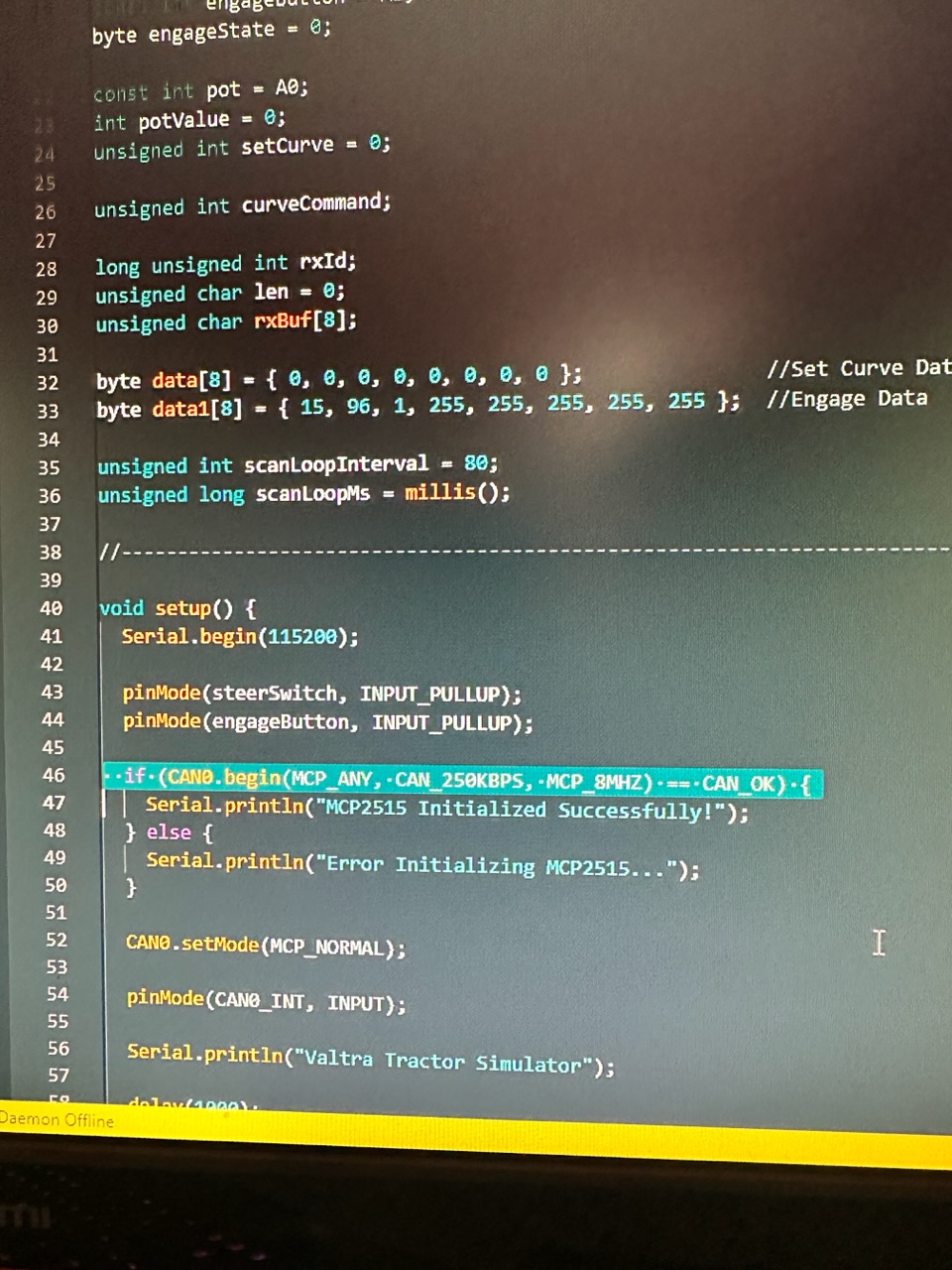
The bus speed is set to 250 Kbps, and the CAN shield operates at a clock frequency of 8 MHz.
Update: I built tonys board and connected it to my f9p - works great, so does the bno085 on it - I see all values in AGO
Unfortunately I can not steer though - I have connected to the plug x230 - unfortunately unsuccessful! Then I read about the x184 and tried them. Unfortunately again unsuccessfully.
I bought a wican USB - a tool for canbus sniffing - connected that to the tractor - lo and behold, I see the can messages from the tractor in savvycan.
Small additional info: I was at my dealer and he has activated autoguide for me.
Connect the Teensy board and open AgOpen. Make sure the tractor/arrow in bottom right corner is red and it points where the front wheels are, it should move when you manually turn the wheels.
The factory steering button must be ON.
Connect a USB to the Teensy and open the serial monitor in Arduino IDE, use the serial monitor to send the Teensy “S” then “R” then “X” I think but it will say on the screen and that will show the CAN message. Look at the 3rd data number and that must be 16 before you can steer. Try moving the steering wheel, driving forward etc and you will see this number change.
There shouldn’t be anything to “activate” from the dealer but the valve and wheel angle sensor needs to be calibrated so hopefully they did that at least.
after a long break i started a new try.
i connected the teensy to my PC and entered S, R and X.
these are the digits i saw in the 3rd data number. 0 (when steering), 16 (when doing nothing) 32, and 80.
I dont know how to trigger 32 and 80. but in none of these states the steering worked.
On my PC i upgraded to the newest version of AgOpenGPS (v6.3.)