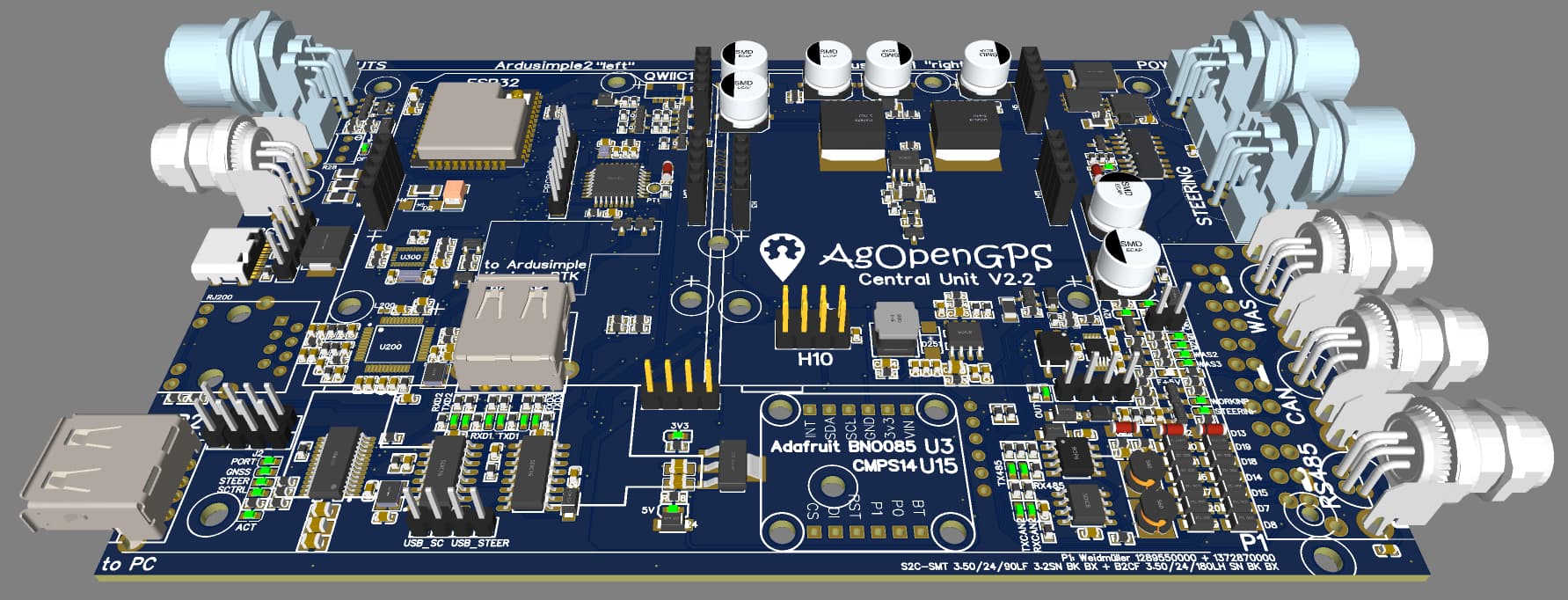
Although my central unit 1.x is still up-to-date, I made an update to a version 2.0. The main differences are the housing from Hammond (I believe it’s easier to source worldwide) and the option for a dual-RTK. Furthermore, there is a section control board, that can easily combined to it.
The hardware structure is pretty much the same as in version 1.x, and so Brian’s Nano firmware will hopefully run out of the box:
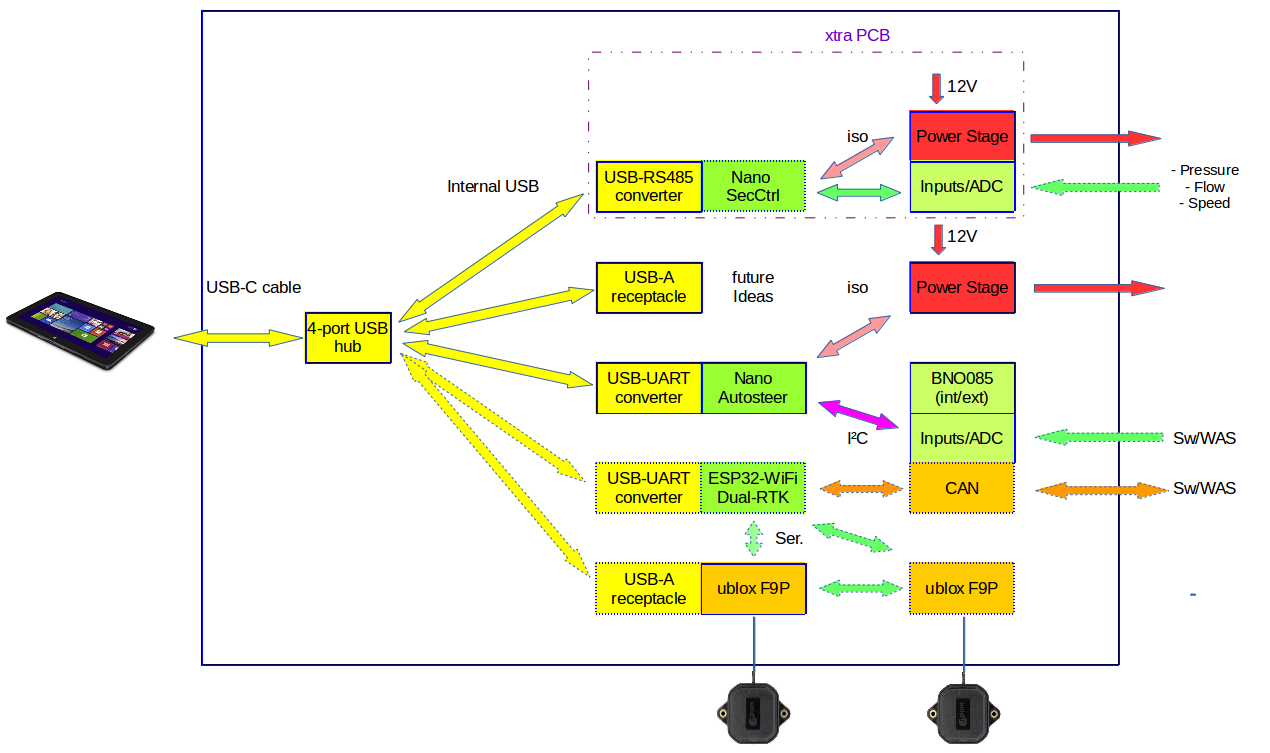
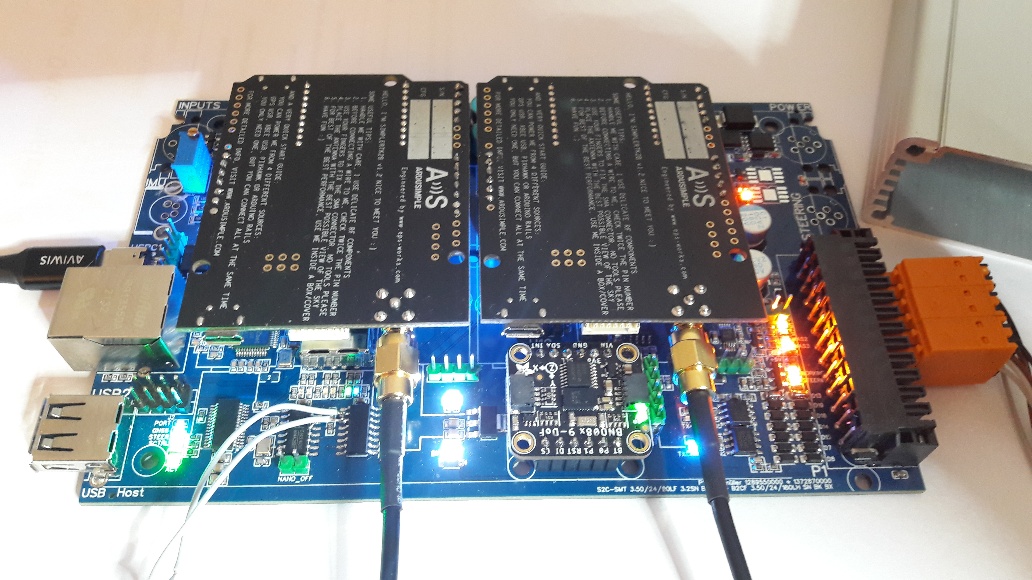
An Ardusimple-board can be added as piggyback.
In case, dual-RTK is intended, just add a second Ardusimple-board. In that case, an additional ESP32 with MTZ’s firmware (with some minimal mods for port assignment) is needed. Nothing exiting - more a proven-in-use approach.
If you like to split into steering and GNSS units (single, dual and/or with IMU), you may do: Just use two PCBs, one for steering and one for GNSS.
With software adaptations, it will be possible to use UDP via the ESP32 as well. The ESP is the only USP sink in that case and has to forward the information for autosteering to the Nano (or take over the control completely). Optionally, it has to forward the data to the SC as well. Anyway just a few bytes and no big deal. Diagram in that case:

WiFi comes with the ESP; for Ethernet via cable, the W5500 must be mounted.
As always, data and further information can be found on my Github account. I’m aware, that the doc isn’t perfect at all, but I’m working on it.
Here’s an image of the top side. It shows M8/M12 connectors, but a 24pole PushIn-Option is also provided (same for the V3.0 board). Up to you…


{kind=link}