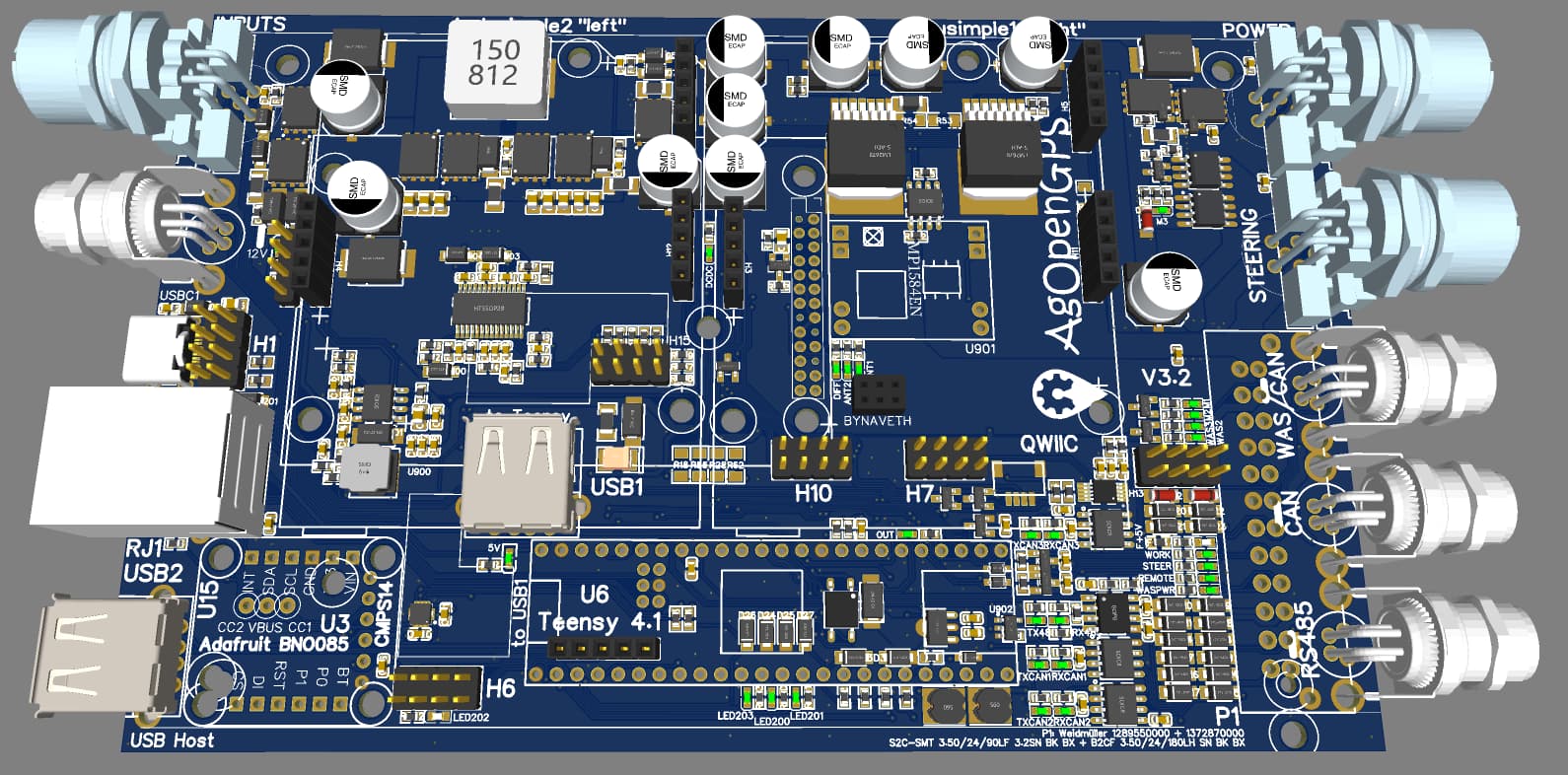
You’ll ask why there is also a version 3.0 of the central unit. Well, this is a my suggestion/contribution for a future platform. Right now, it works fine with the Nano, but together with an ESP32 and another one for the SC, it’s more or less a unnecessarly complex system with different softwares and architectures. On the other hand, new platforms are upcoming, and there is a really professional one with the Teensy board. Its controller is automotive-suitable in general, although “only” an industrial grade on is mounted. And it’s powerful enough to run the whole AOG and to provide a webpage for the HMI. But migrating the software is a real big job, and so a first step will be just to put the Nano and the ESP code on it. This is ongoing and will be published soon.
If you like to split into steering and GNSS units (single, dual and/or with IMU), you may do: Just use two PCBs, one for steering and one for GNSS.
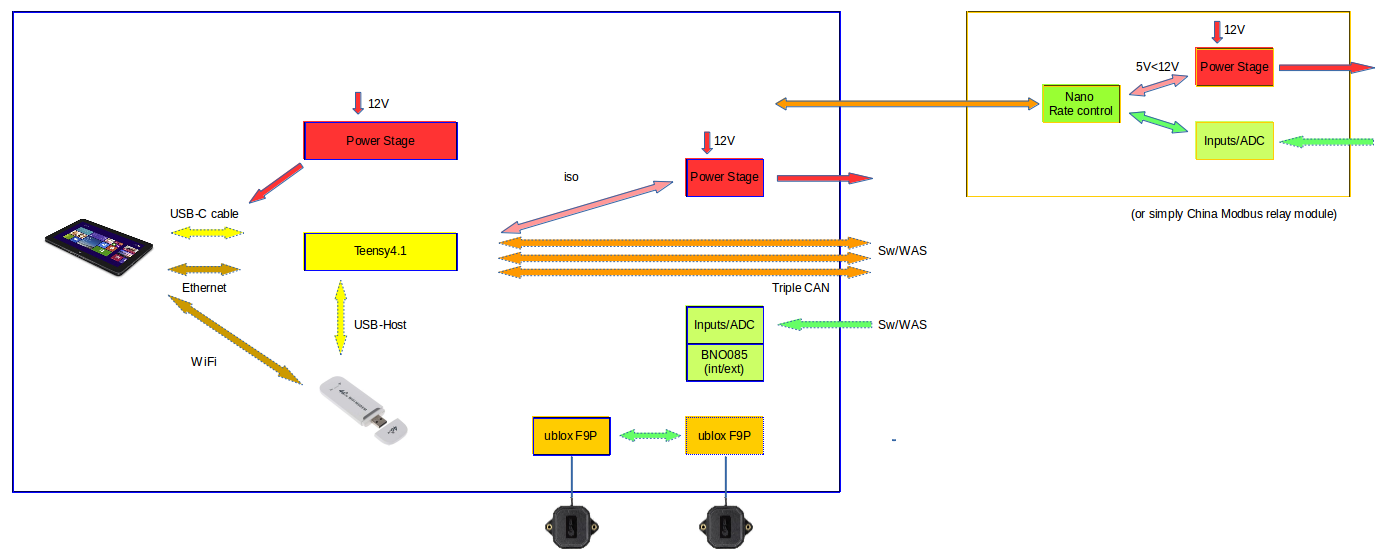
Due to the one µC core, the diagram looks clean and simple:
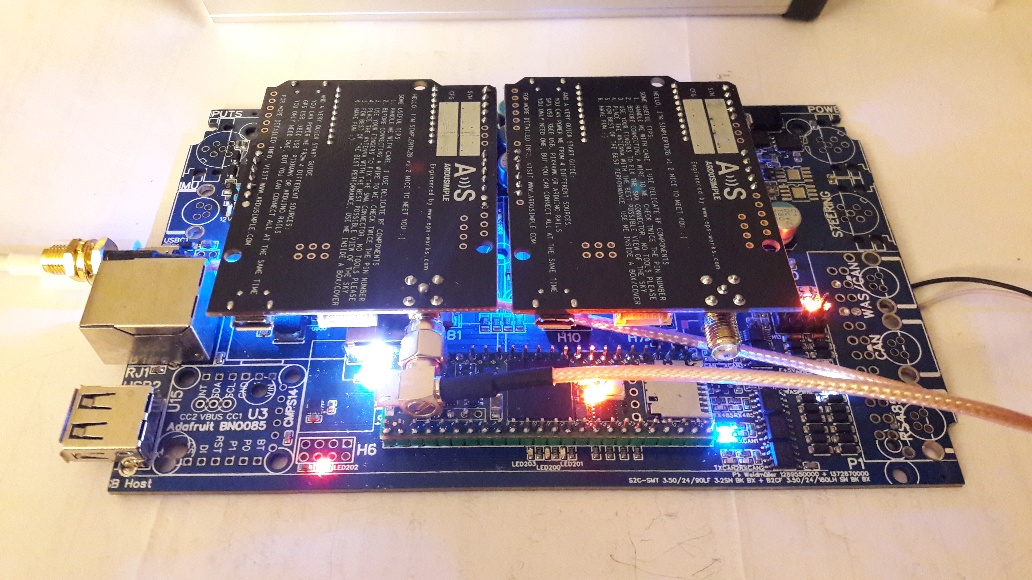
One or two Ardusimple-board can be added as piggyback. Bynav may be used alternatively (has technically no advantage).
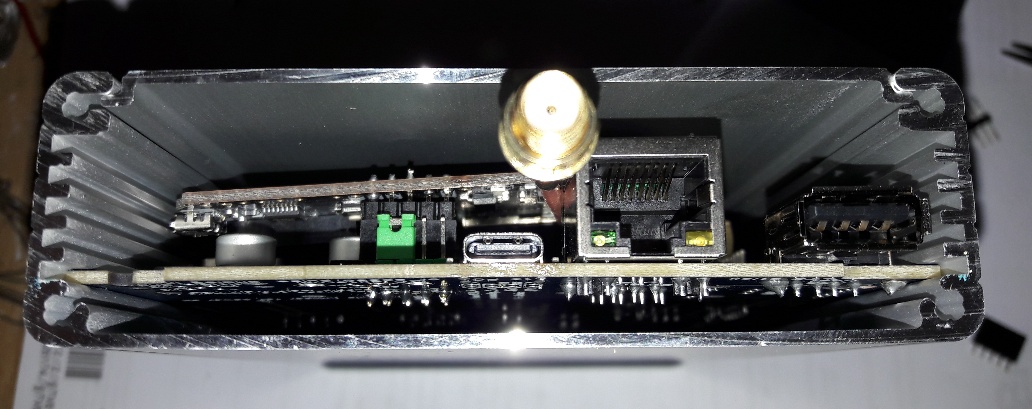
I’ll once more try to implement charging the tablet within the board, which is quite complex with USB-C 3.0, but possible, so that there’s just the box and the tablet in the cabin, connected by a simple USB-C cable.
The data and further information can be found on my Github account. Again, I’m aware, that the doc isn’t perfect at all, but I’m working on it as well.
Honestly I didn’t really try yet. Will do my tests with the PushIn option, and I have a few in my stock. Furthermore, panel-mount M8/M12 are still available (e. g. here), so worst case is just soldering some small wires between the board and the connector. Not nice, but not the most difficult issue these days.
It’s also possible to use the connectors mentioned in the link for an 180° placement (on bottom) directly. Depends on the housing concept you have.
Main feature: Support of TI’s RS485-over-power-bus like Central Unit V2.x, so that devices like IMUs can be connected via a jerk-proof two-wire bus with power and data. The wires may even be mixed. More details in this posting.
There is a very first firmware draft, that does steering and can handle one or two Ardusimple, but this is not yet running with AgIO. Also communication on the USB-C CC lines is working in general, but I still don’t know how to do a power role change… Let’s see… Draft is in Git.
By the way: License update done to Cern-OpenHardwareLicense-S-2.0 to keep the project open for everyone in the future. Everyone is allowed to copy and produce everything of this project, but has to open her/his mods for the community.