Hello I am New to Hydraulik System, my current Projekt runs with electric Motor.
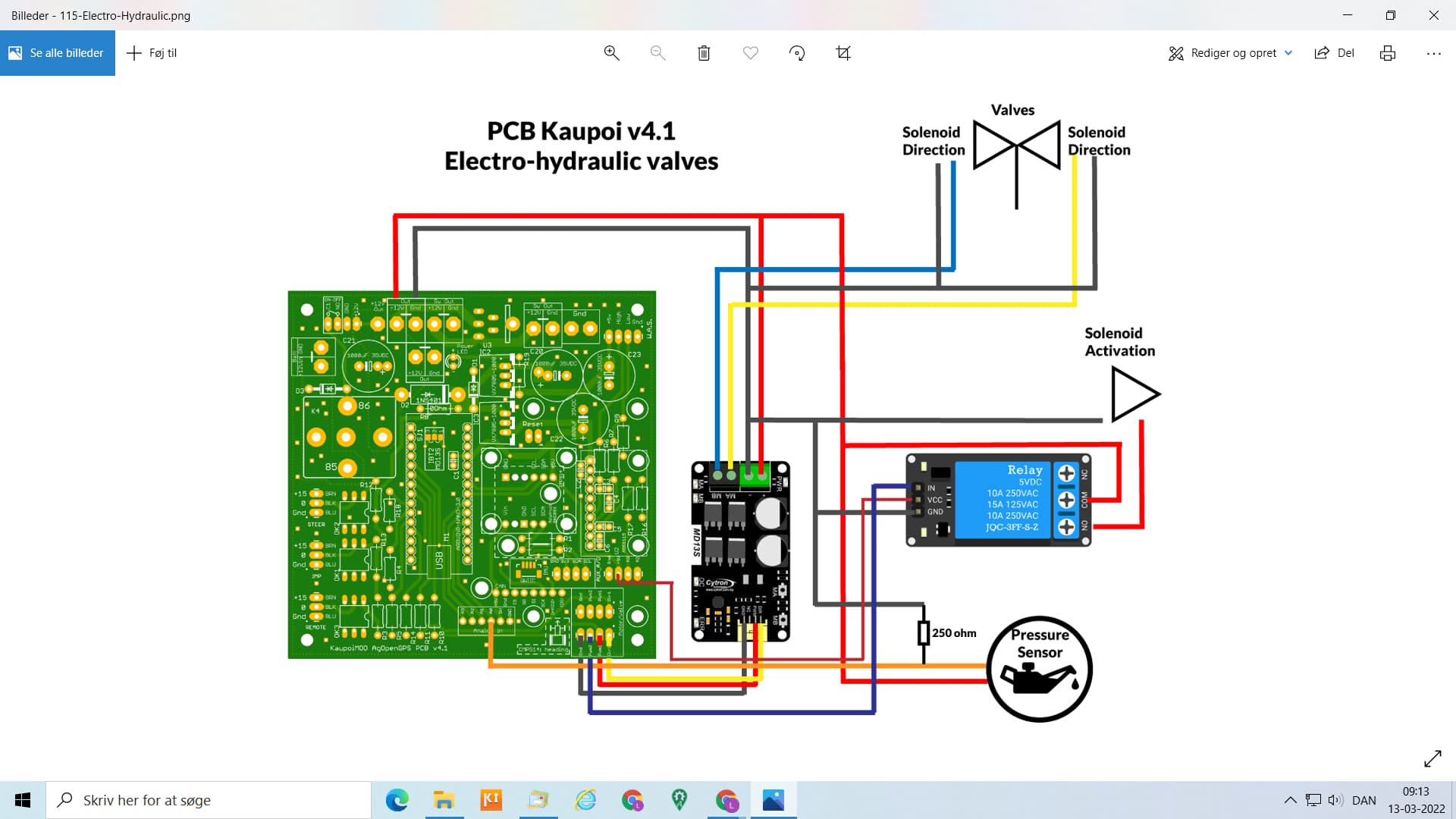
What i understood is that, A and B from Cytron will run the solenoid of the Valve left/right.
And the Pressure Sensor should detect manual steering movement. And should be connected to ads1115 on some pin. When the pressure Sensor deliver a voltag What will Happen? Just deactivation of the Green steering wheel in AOG on the right bottom to Red? When Sensor detect than no movement of steering wheel, will the System steer again? Or need the autosteer Switch be Presse again? Correct me if I am wrong. For me that is Not enough safety. Could it be possible to connect the Sensor with an Arduino Relai and diconnect the Power supply to the Cytron Board and acrivate the Relai again with an Button.
Maybe someone already habe ab suitable Schematic also with Sone Safet logic in it.
Yes, when the Sensor detects Pressure and delivers a Signal high enough for Agopengps to shut off, steering deactivates. Then your Button needs to be pressed again. You could also use 4/2 Valve for Safety, this could be connected to disconnect Pressure and Tank of the Left Right Valves.
It seems that you don’t want to use a PCB, see support folder for diagrams anyway.
I don’t have time today to do full search for you, but this is one when typing wiring in search field at top. Wiring diagram?
Yes i get it but than in the ino of the current steering Support files i dont find where to define the input for Wheel Angle Sensor on ads1115 if its a0 a1 a2…
But for hydraulic steering you just use normal autosteer ino.
You have a autosteer system already. WAS is still connected same way. Then connect pressure sensor to nano A0 and cytron motor A to left hydraulic valve Motor B to right valve.
Do the settings in AOG.
Wiring is here and in support folder too.
Ok, Sounds good. I want to use a Arduino Relay and connect the PWM 2 pin with it to cut the 2 wiries A&B to the solnoid valve. But What i understand currently the PWM2 pin is high when Not steering.
But wouldnt it be more Safe when the wiries are cut when PWM2 is 0 and connected when PWM2 is high? Besause the default Position of the relay would than be connected. What is the opinion on that?
//we’ve lost the comm to AgOpenGPS, or just stop request
//Disable H Bridge for IBT2, hyd aux, etc for cytron
if (steerConfig.CytronDriver)
{
if (steerConfig.IsRelayActiveHigh)
{
digitalWrite(PWM2_RPWM, 1);
}
else
{
digitalWrite(PWM2_RPWM, 0);
}
}
else digitalWrite(DIR1_RL_ENABLE, 0);
No it is only high when steering, so just connect as the diagrams show. The relay on PWM2 will then be active when autosteering.
There is not a diagram showing exactly the way you want to connect, but this one is almost the one. You would need two of these relays (or a double relay) in order to cut both A and B.
Or you could move the relay so it cut the +12 V line to the cytron and then only need one relay.
This diagram (from wiring diagram on discourse and also in support folder) show the way I have it, to give power to my 6/2 valve when autosteer is on.
I have a question regarding PWM2. I had my hydraulic valve setup also wired with a relay like shown in the diagram. The problem I observed was that the relay was simultaneously switching with PWM1. For example, the tractor drives on the AB line, no PWM1 signal required for steering corrections → no PWM2 signal → relay is off. As soon as PWM1 signal is sent to correct the steering, PWM2 switches on. So the relay was switching on and off all the time and broke very quick due to the high switching cycles. As a result, I rewired my setup without the relay.
Do you also have this phenomenon with PWM2?
That should not be the case. In normal operation PWM2 will always be high when autosteer is on. But you are right about fast cycling, but this appear when ON conditions are not meet, like the min speed.
I have a led only on this pin so I see how it react.
The code should be rewritten to avoid this.
DIR on ibt2 and PWM2 on cytron should react exactly the same the way I understand it.
Hi there I am having the same problem using the hydraulic control relay. When PWM 1 drops to zero pwm 2 also disconnects turning my relay off. How do I set it so pwm 2 is on the entire time steering is engaged? Thanks