Hardware
-Toughpad
-Arduino Nano
-5v 2 relay module
Hi, I am having trouble finding an Arduino sketch that will activate my relays. I was able to code a sketch to activate/flash the LEDs on the relay module but the sketches I’ve found to activate the relays has failed to work. Can someone please point me in the right direction? #noob
Welcome
So you have no autosteer pcb?
And none of the machinexxxx .ino files in support folder work?
For just 2 relays autosteerxxxx.ino can Work . Some ideas in this thread post 40 and some of the next posts
Some links to pictures etc. do not work any more (mostly links from time before moving to new discourse server, around spring 2021)
If you are making sketches you probably have understanding of arduino, so I will not go into basics.
When you download latest AOG download latest support folder with it you have manuals and Schematics look for Machine_USB_v5_0.ino and MachineUSB_Schematic.png
You can test Machine_USB_Board without GPS or Autosteer board attached
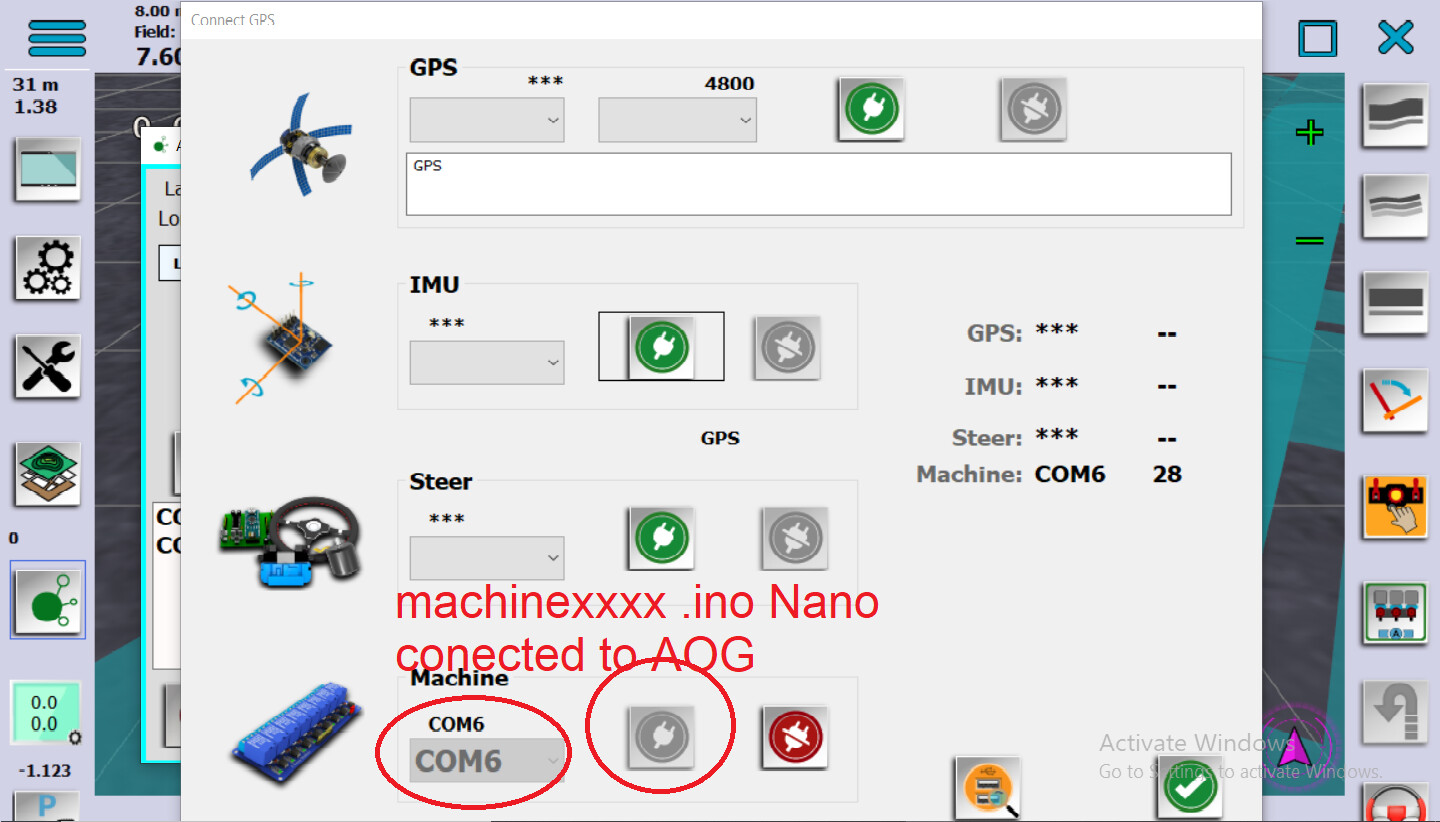
But like autosteer or GPS you need to select right COM port and turn it on.
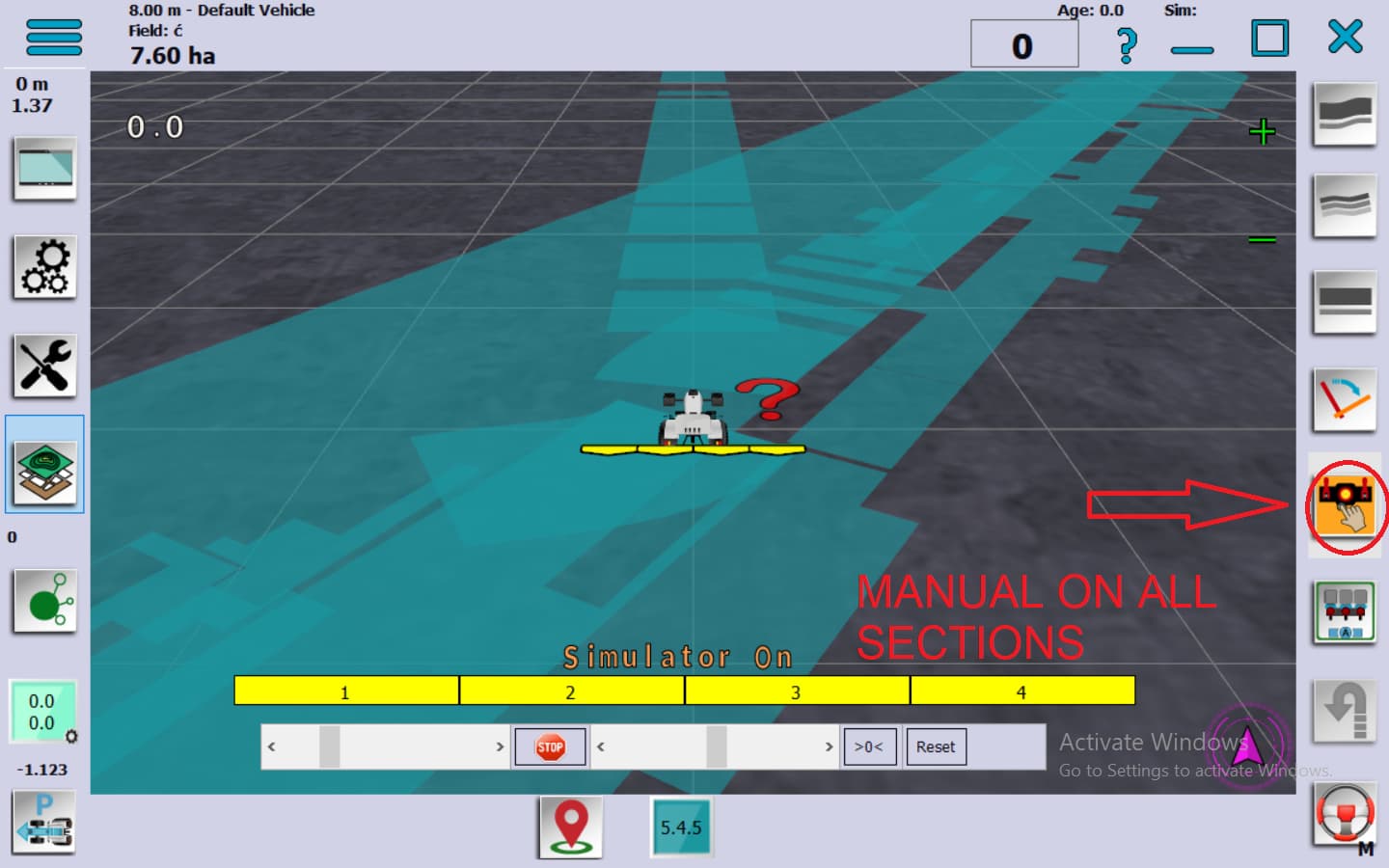
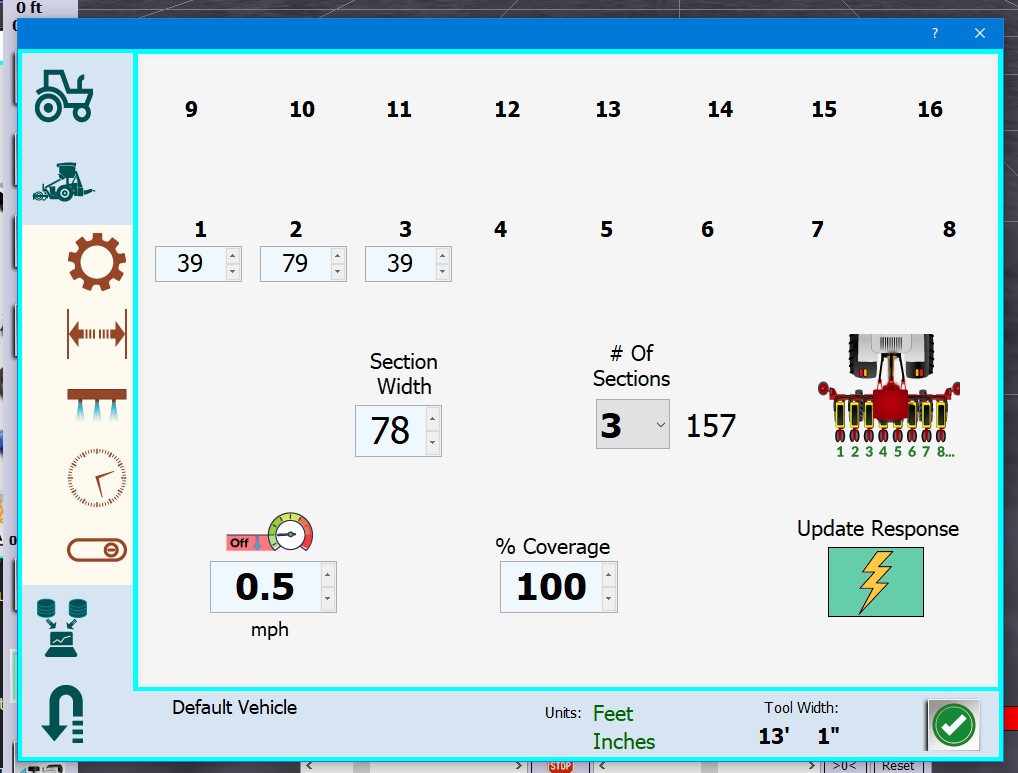
You also need to be in simulation mode and open a field and turn on section control auto or manual on.
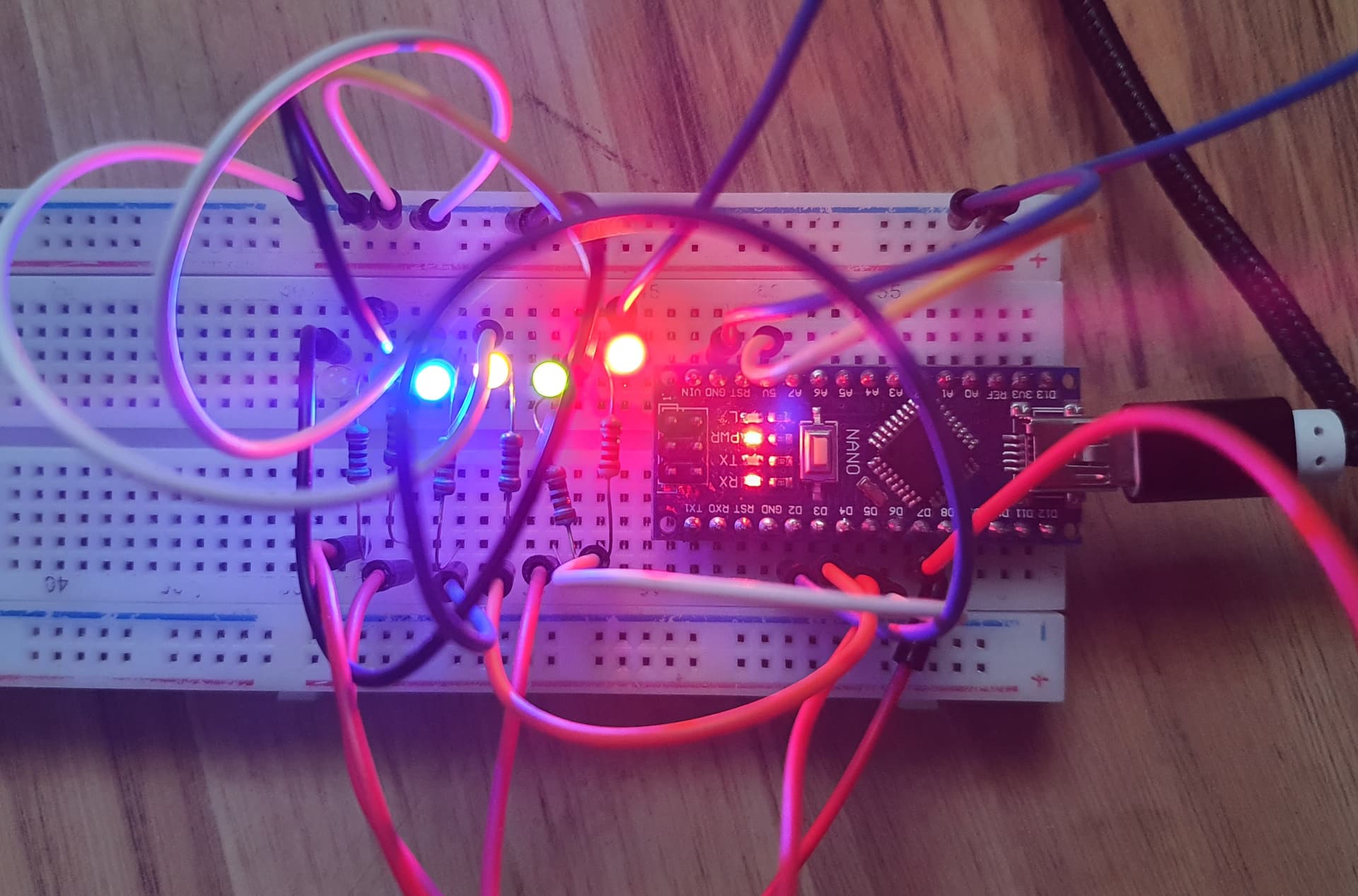
Look at end of ino what pins are used, maybe try with LEDs to easier visualize what section in AOG is for arduino pin.
2 Likes
Ok thank you guys! I finally got everything working. I’m putting this setup on my ATV so no autosteer. I will just follow the light bar on screen. I managed to connect a Starfire ITC to AOG and will hopefully upgrade to something better soon.
Today was my first day spraying with ag open gps. Section control worked pretty good, but the on screen map really jumped around a lot. Coming up to the headland pass it often looked like I was approaching on a 45 degree angle. Any ideas to try?
Are you using RTK and IMU like BNO08X or CMPS14 ?
What type of GPS?
How is your GPS set up?
It should output messages a 8 or 10 Hz (I think yours only output at 1 Hz)
Or you output too many types of messages (Will slow down Agio): V5.1.4 Release - #196 by BrianTee_Admin
Or your baud rate is tool low ( go for 38400 or more)
If you have F9p this might help: Ublox F9P - Config for rover - #73 by Jean and the rest of the thread.
You dont need RTK or IMU to drive a straight and stable AB line (but with IMU it can be a little better)
If you have IMU you can test without roll influence from IMU, by setting antenna height to 0 m
With single F9P accuracy is 1m IMU is not needed but helps with heading and roll your lines will be straight to your GPS accuracy how can you have better lines then your accuracy?
Good config helps but single GPS (F9P) is not stable and jumps 0.5m± if that accuracy in not satisfactory, and you need better accuracy you need to go for RTK.
Section control will be accurate to your GPS ±
you can go RTK without autosteer and use AOG as RTK lightbar and section control. You can upgrade to autosteer for there.
Be careful not to confuse the OP rather than helping him.
Many commercial system run on EGNOS corrected GPS only and section control is fine as well is AB-lines. Absolute accuracy is poor but section control hardly suffers there as long as pass-to-pass or short term relative accuracy is good.
sorry if I been confusing.
commercial units often are 10cm± 20cm ± but they work good just can’t expect perfect lines, section control will work fine with single F9P and he said it’s working but it will have jumps described.
config to get 10hz will minimize jumps.
(I tried single ardusimple F9P and it’s around 0.5m± there are some users that get better but that’s not needed for section control when you have rows you manually drive between them and your section control will 0.5m± over or under spray at headlands if you don’t have rows GPS is a lot better then eyeballing it)
good config for F9P as @Larsvest suggested.
One more thing to try: set fix to fix (Fix trigger distance) at 2 meter maybe 3m.
In this video with a 12 m harrow (weeder) I ran single f9p no RTK and no IMU. AOG ver 4,3 (Oktober 2020)
The visual AOG overlap is because of wrong machine offset. And this last track is 1 hour later so also about 0,5 m satellite drift. There are some “snaking” due to shifting drag from the 12 m harrow (gets very bad when I reduce low max pwm.) The front wheels do not flicker. Looking out of front window you see lines from 4 m seeder, also done without RTK.
https://1drv.ms/v/s!AtUk3Aai6aI9gwcJoDc--xBNcv9t?e=61aR3e
And off course Ver 5 and RTK is better ![]()
1 Like
I’m using a Starfire 3000 receiver with RTK without any IMU. It has the option of 1 hz, 5 hz, or 10 hz. It was set on 10 hz with only GGA and VTG turned on and a baud rate of 38400. My toughpad kept freezing up with it set at 10 hz. Today I updated to the latest version of AOG and set the receiver to 5 hz with all the messages on. It worked really smoothly. The only trouble I had was the section control relay disconnecting from the tablet a few times in the middle of the pass. Maybe a bad usb connection? I’m using a usb hub. So I don’t know which change fixed it but I’m not complaining!