I’ll have to remove the header pins to do that then as the front pins will need to be attached aswell. Ive got the plug for the cytron
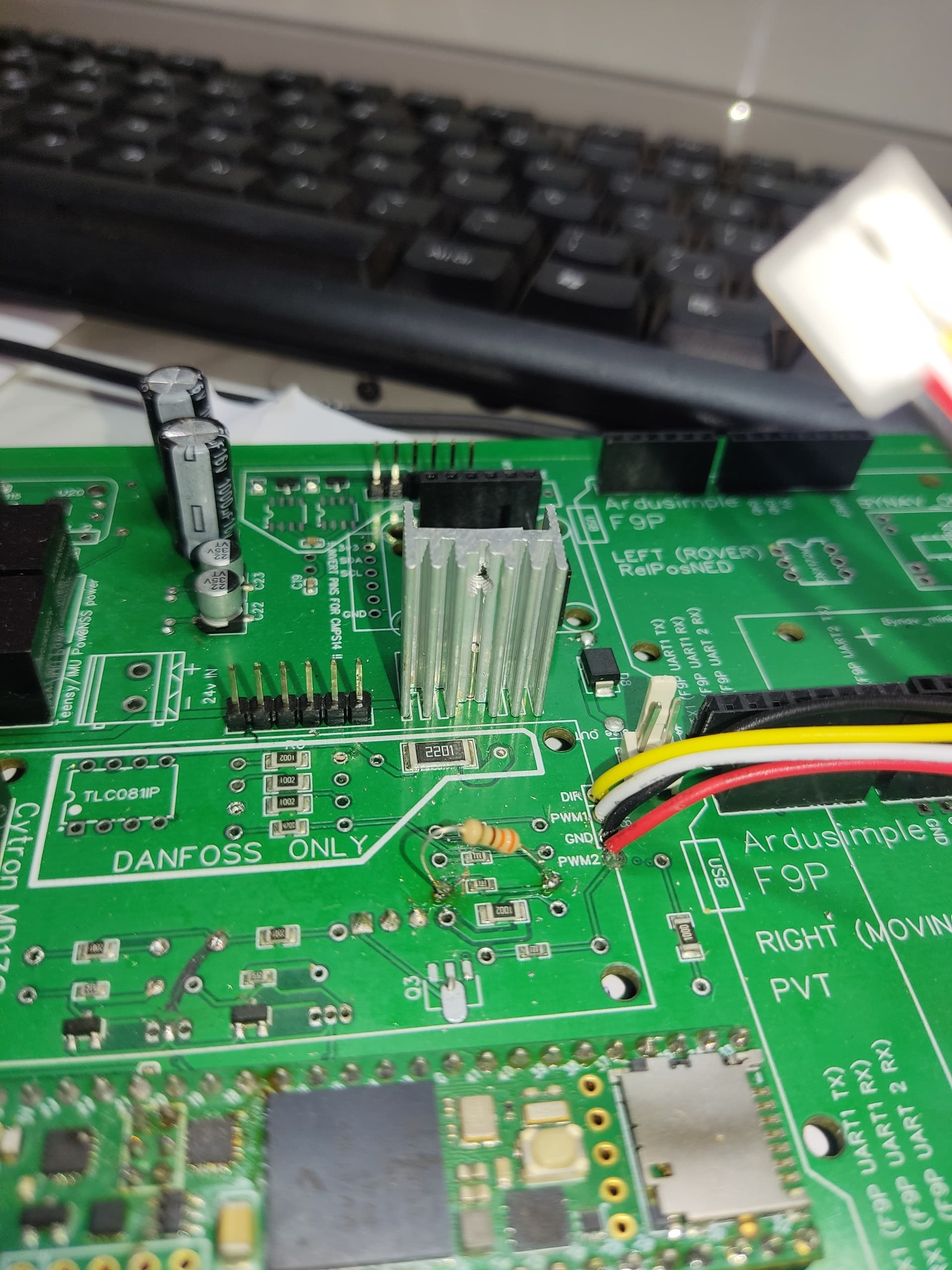
Whats that 1k resistor doing there?
Do you have mod in cytron?
I think it’s 330ohm resistor, ( brown-black-red= 1kohm)
Kim
1: If you’re not moving (real gps or sim) it won’t output PWM to the cytron
2: You have the free wheel mod on the Cytron but the 4th pin (PWM2) is not connected to NC. You have to use either a 4th jumper wire, or use the 4 wire connector that comes with the cytron. Without it, the Cytron stays in free wheel mode.
No i havnt modded the cytron will be using the relay option to dissable steering when i get it going

IT is there because they have done the Cytron modification, you have not because your MB and MA buttons on cytron still work.
EDIT: to make direct connection from correct teensy pin just plug in the cytron and wire direct from teensy to the last hole before the cytron. BUT didn´t you just measure if there were connection from teensy to cytron?
Which Teensy INO do you use?
In autosteer part of the Autosteer_gps_teensy_v5_5.ino you find this information:

autosteer_gps_teensy_v5_1_xbee.zip.
Is the ino i used this morning after it was suggested i try this.
I originally used the ino from the 5.7.2 folder with exactly the same results.
First do another test (because you have told us voltage from teensy pins that does not seem right (like teensy think you have IBT-2)
SO :
Change AOG to IBT-2 and send to teensy! Now measure voltage on teensy output pinns for motor controler (pin 2 to 4) While PWM is 150 or something
NEXT change AOG to Cytron and send to teensy! Again measure output on pins 2 to 4
Do not change wheel angle in between!
Maybe read this thread about jumpers for cytron pwm
Ok so i think we’re sorted ![]()
Went through all the settings and double checked everything. Double checked all my jumpers and happy with them.
Got the magnifying glass out and on a really close inspection there was the tiniest fragment of soldier between 2 header pins that jlcpcb fitted ![]() i couldn’t spot it when i previously looked. Using the magnifying glass i was able to melt the solder away.
i couldn’t spot it when i previously looked. Using the magnifying glass i was able to melt the solder away.
Im so sorry to waste everyone’s time and also extremely grateful for all those that did offer advice, this place has an extreme wealth of knowledge.
I think in future i wouldn’t let jlcpcb solder any of the header pins on, more because they make up a run of odds and sods and nothing fits without a bit of pin bending.
Now when i go into pwm mode the motor fires up straight away and goes from left to right when i press the arrows.
Altered and saved some steer settings and setup a switch and all still works.
Once again thanks to all for help and pointers.
And i hope i can repay giving some advice in the future ![]()
Now i just need to get it all fitted to the tractor and fine tune some steer settings
The resistor is there to fix the pwm2 output that is used for Cytron’s with the free wheeling mod. These Cytron’s need a 4th wire.
Hooray! Header pin on the Teensy or something else?
It was a header pin on the bottom of the teensy on he underside of the pcb. Was the smallest of fragments.
I must say most of the small components jlcpcb done a good job fitting but the header pins are crap, they are made up of odds and sods and dont line up and requires some pin bending to get the components to fit.
I must admit that when i spotted it i wasn’t convinced it was the problem but it was