The ethernet works perfectly, if i connected 24v to cytron, connected the 24v motor and the steering sensor through ampseal, i could “steer” with it.
Using the ma mb buttons you mean?
Without that teensy flashing orange light with the sketch uploaded you wont get much more to work.
Double check all the solder joints underneath the teensy.
Theere is a link somewhere to test for voltages as you go along as you add each component
I could steer with the WAS.
I have checked every 5V, 3.3V pins and also tried these components on another PCB with the same result. I have reheated every pin on the Teensy, IMU and GPS too.
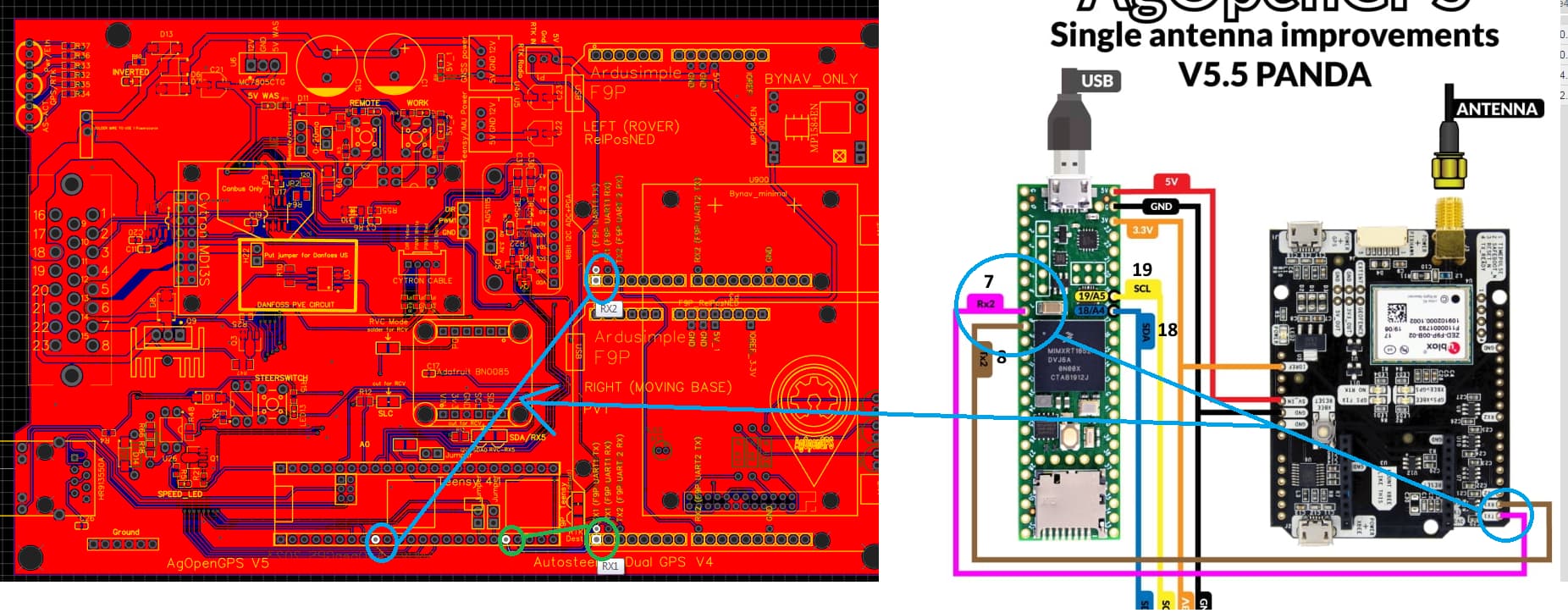
The GPS TX1 header gives only 0.5V, should this be 3.3V too?
As wland said, you need connect an antenna. Also, the antenna needs a clear view of the sky. When you programmed the Ardusimple board with U-center, did you save the configuration? Progamming it with U-center is a two step process. The first step puts the configuration into RAM and the second step saves the RAM to flash. If you don’t save it the Aurdusimple board will revert to the original configuration which is not right for AOG.
I think i was getting confused thinking he had a teensy issue
Would the problem you listed stop the teensy light from flashing orange?
Sounds like its all mostly working
Light in teensy only flashes when GPS being received, nothing to do with whether flash is good or not. Without an antenna, no GPS. And you shouldn’t power up an f9p without an antenna attached, it’s not good for it
2 Likes
Yes. If the GPS has no signal / fix it will not generate the proper data for the Teensy. If the configuration of the Ardusimple board (serial port, speed, messages to send, etc.) are not correct the Teensy light will not flash. The flash of the orange Teensy light is triggered when the program on the Teensy properly decodes a message from the Ardusimple (GPS) module.
2 Likes
I have a question about a board with a single GPS module, should it be mounted on the right moving base ) or left ( rover ) ?
Picture just up abit has it placed in the right side.
Trawl through some pictures if you need more confirmation. Not sure if theres anything on the github about this

I’ve got this image from ArduSimple Facebook page, Antenna isn’t attached, but the Teensy and the F9P could communicate.
Please somebody can measure the voltage on the TX1, RX1, TX2, RX2 pins if it is powered through the pcb(not just connected the F9P via microUSB)?
If I measure it on my F9P the RX1, TX2, RX2 pins are ~3.3v, the TX1 pin gives only 0.5V-0.6V.
I have figured out the problem, and it is probably a hardware issue.
I wanted to measure the XBee TX pin with my multimeter but it has a thicker pin, so I plugged in a jumper cable to the TX pin to measure the voltage.
When I plugged in the jumper cable to the XBee pin (only the cable without the multimeter or anything) the F9P started to communicate with the Teensy.
It’s working till now but it have a faulty rail or something.
Hello,
What meaning RCV mode on PCB AIO ST 4.2 ?
No need ACS1115?
It does not make much sense to measure TX/RX pins with a multimeter. TX/RX pins turn on/off rapidly, the multimeter will just do its best to try to average out the readings, but a multimeter is not very good at doing that. Any voltage above 0.0 on TX/RX pins indicate that things are probably working.
RVC is a different way of communication between the IMU and teensy. More information on the telegram chat
1 Like
Hey Guys,
I’ve got a problem. V4.1micro worked really well with the laptop. finalised all the wiring from testing setup to final wiring and changed to a Panasonic tablet, with version 5.8 AOG, now the steering won’t work anymore.
cytron receives 24V, swapped cytron for a known good one, wiring to the electric motor is tested and is OK. Did a reflash of the teensy with latest version. The Teensy is flashing orange, and the DIR PWM1 and PWM2 led are orange too when I engage autosteer.
WAS input is OK, and software is giving a correction angle, but still i get no movement on the steering motor what so ever!
I use a button to engage the autosteer, this is working too, on the tablet the autosteer engages, I’ve set minimum PWM to 40 which should be sufficient (during testing with laptop it was around 20 to work fine)
What am i missing? how do i get the steering to work? what can i check?
kind regards!
have you got a minimum speed set?
have you tried it moving?
Yes, ive set the minimum to 0.1KMH and tried it while on the move too.
stange thing i noticed while testing is that i get a really erractic signal on pin 7, the Lock signal. I use this 12V to power a light indicating that autosteer is on. However a few times i noticed the light wasnt coming on as i would expect. later on i got it flashing really random, together with one of the indicator LED’s on the PCB. maybe the teensy gives out a wrong signal and no PWM? can I test this in a way?
Can you get the motor working when pressing the drive function buttons in the expanded steer settings menu?
Double check your wires arw right on the relay or maybe its faulty
Double check your steer switch enable setting is right for the type of switch or button that your using
No the motor wont do anything when i try it like you proposed, I almost did the same thing but then in the steering setup wizard where you can power the motor. Double checked the wires cant find anything. Changed the ethernet cable and back to the laptop, but nothing