Before we start. Like all posts, this is point in time, and you might notice the dates are out of order now, because I’ve been editing things as new information has come to light, or there’s a better way of doing things. As such, don’t think of this as “if I follow this, it’ll all work out great”. Have a read and see how things are done in general. The team are trying to get some proper documentation going in the Wikis, for AOG itself and for the BOARD. So check them out too!
If you’re cool with the above, let’s proceed…
Thought I’d document my Micro v2.4 build as I work my way through it. Most of the things I’ve got stuck on, someone has already asked and answered elsewhere, so I thought a single thread I can put all my thoughts, process and mistakes(?) might be of some use.
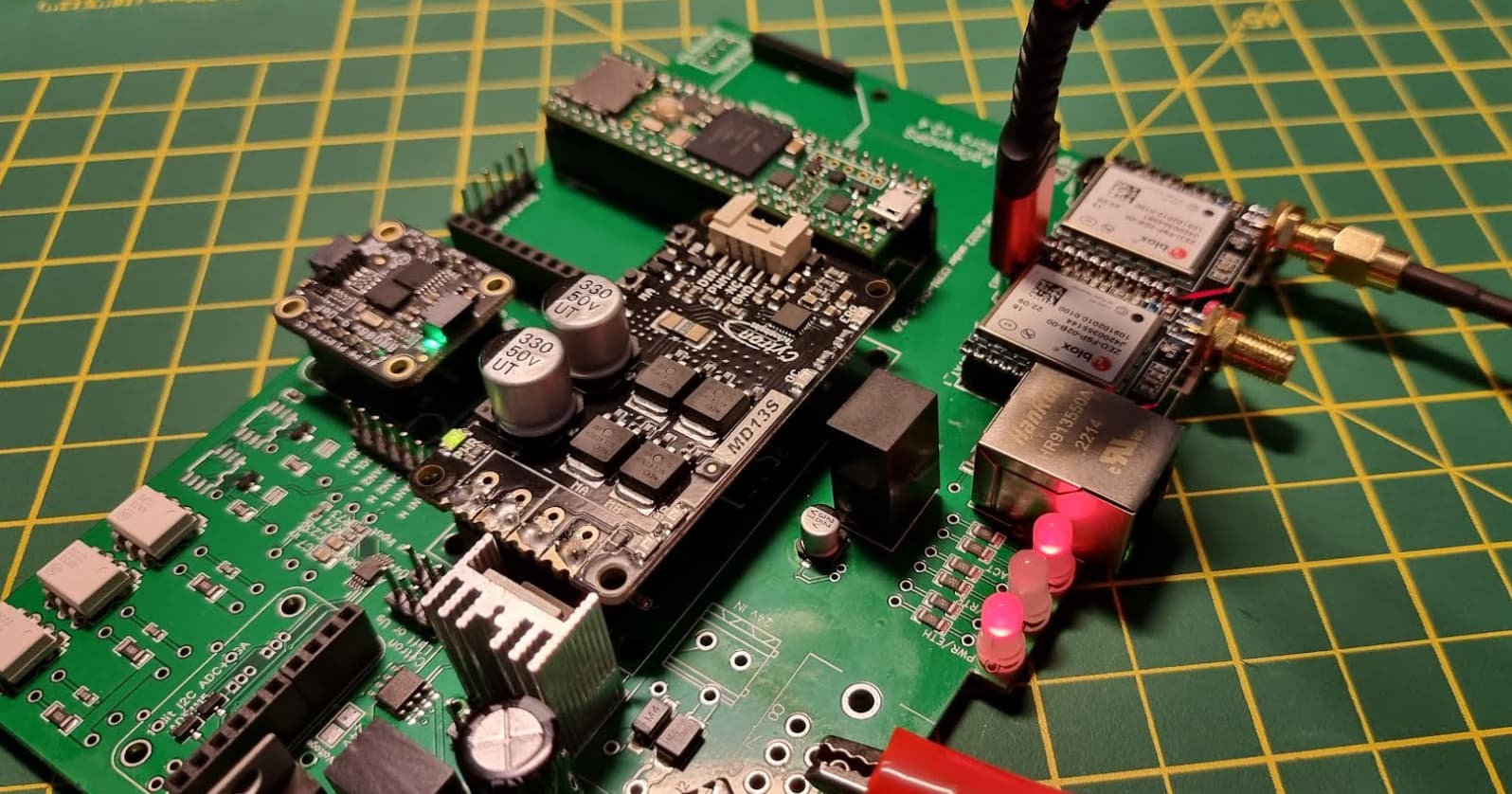
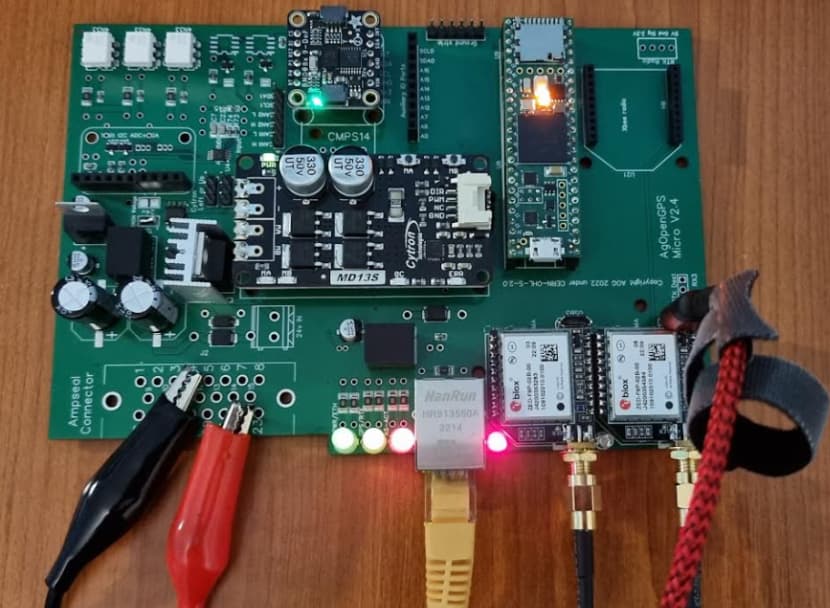
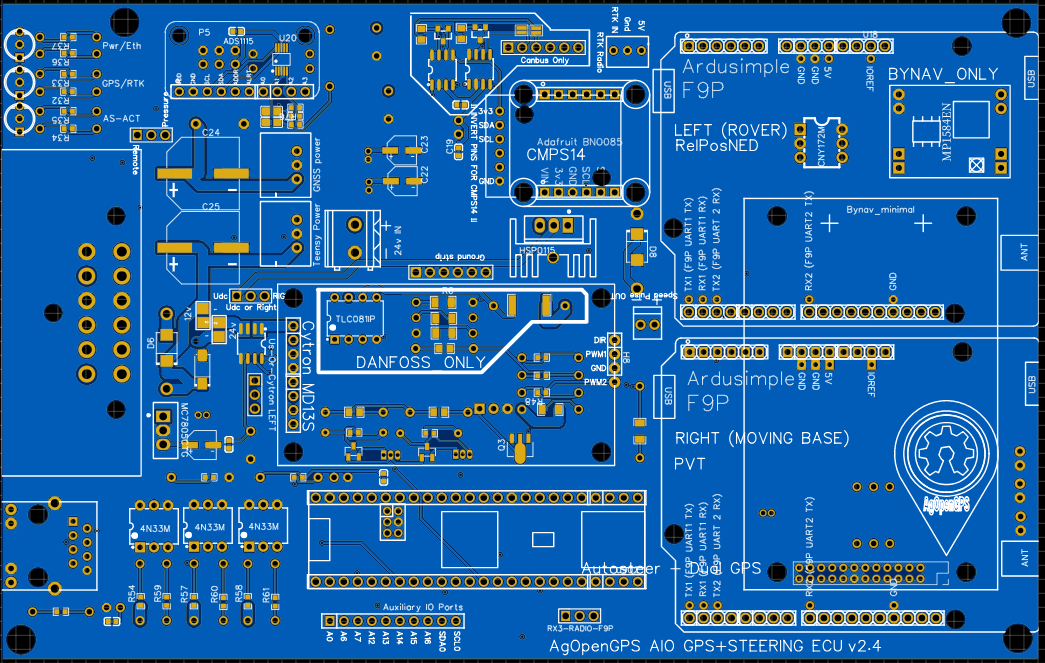
I got in early at JLCPCB and as such, I think I got pretty lucky with the components that it came with and as you can see, I went with 23-pin Ampseal connectors and Micro F9P.
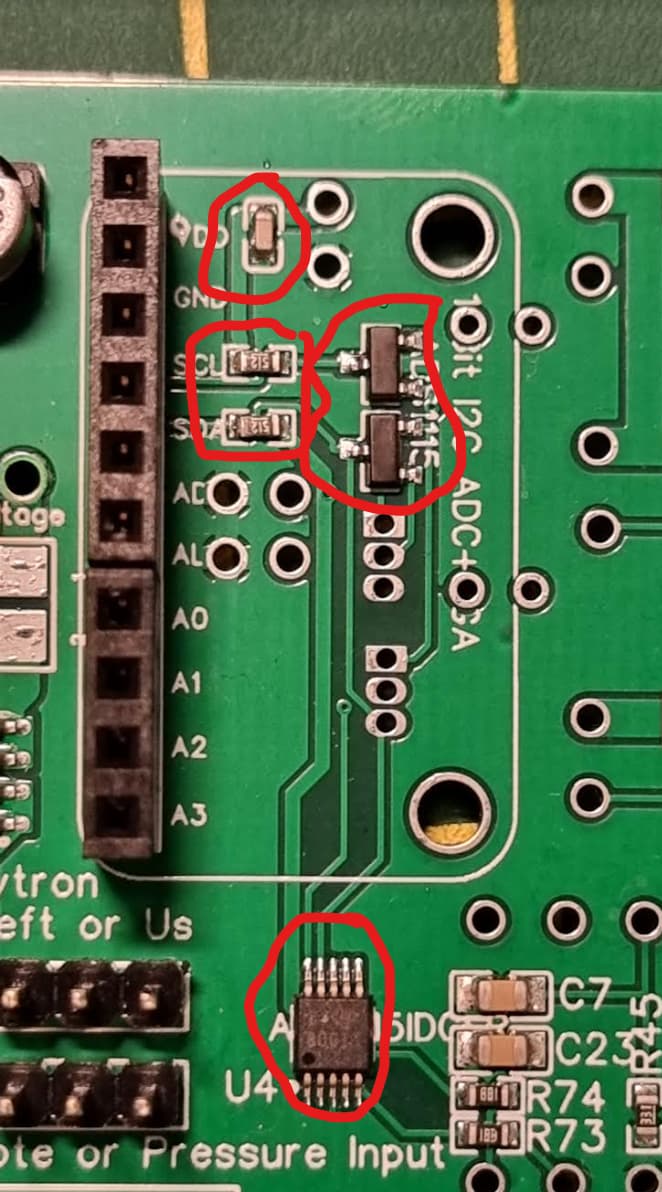
So, here’s what arrived. In my case, the critical parts that I thought I needed, highlighted in red, were missing. Checking the standard board reference images, there’s ring-fences for parts needed for CANBUS and Danfoss, not sure why they’re not marked on the Micro tho but thankfully the Telegram team advised I didn’t need them.
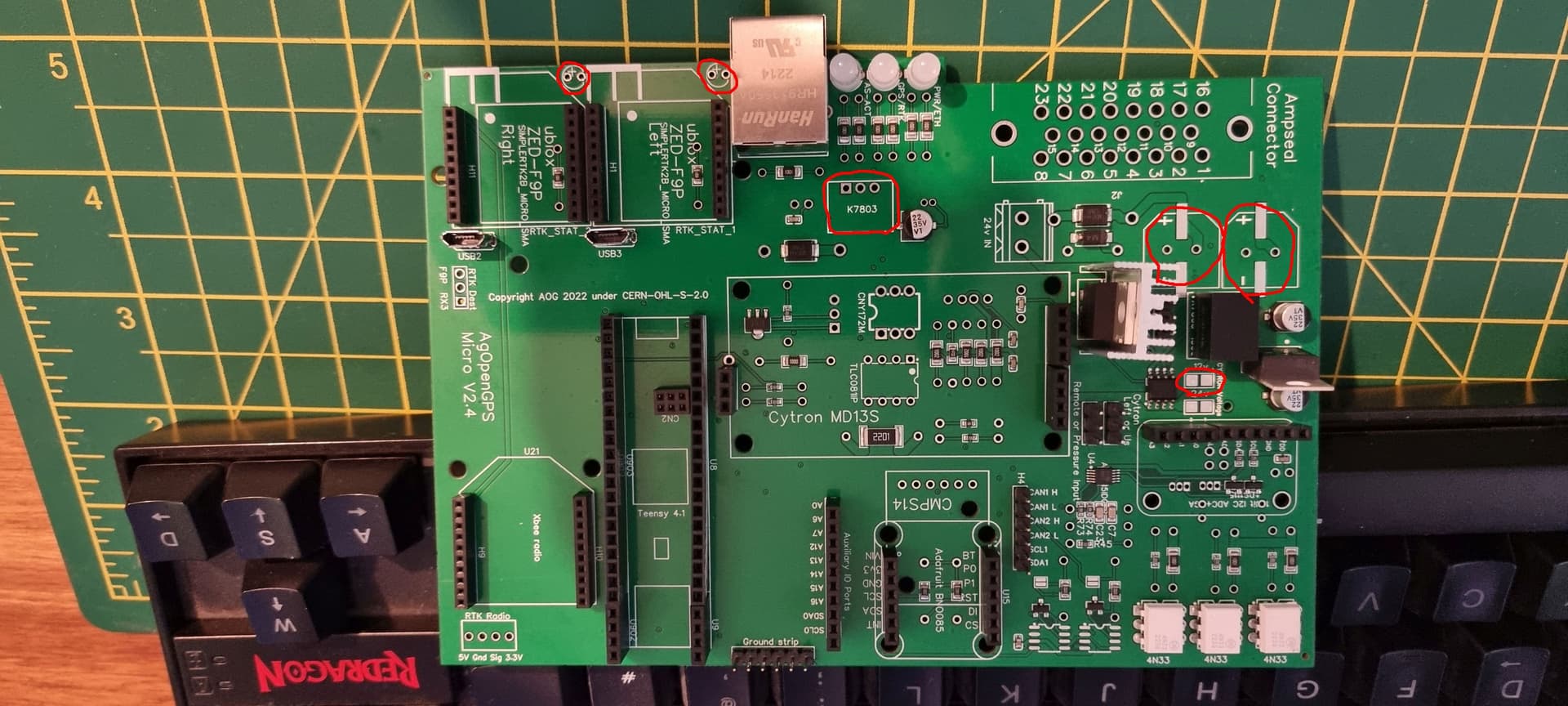
Those were 2x1000uf capacitors, the K7803 voltage regulator, and two little LEDs that I used from my previous PCBv2 stock. Also, as this is intended for a hydraulic valve tractor, and not to drive a motor, I soldered across the 12V bridge.
OK, and this just in - NEVER power up your board over 12V while the Teensy is connected over USB. See this page for why!! Note that in my pictures below, I’ve done that. This could have caused USB port damage on my PC. I got lucky - you might not. So don’t do it!!
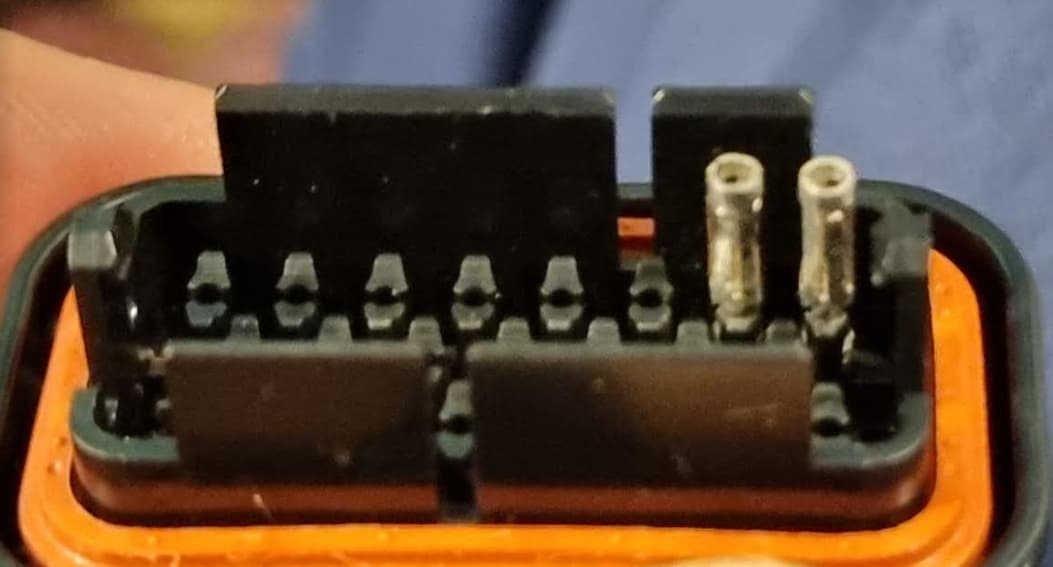
Then, onto the power-up sequence. I wanted to take things slow to watch out for the magic smoke. Checking the pin diagram for the Ampseal, pin 22 was 12V in, and 4, 21 and 23 were ground. I lightly turned some 3mm bolts in, performed some dark rituals, and connected up my power supply.
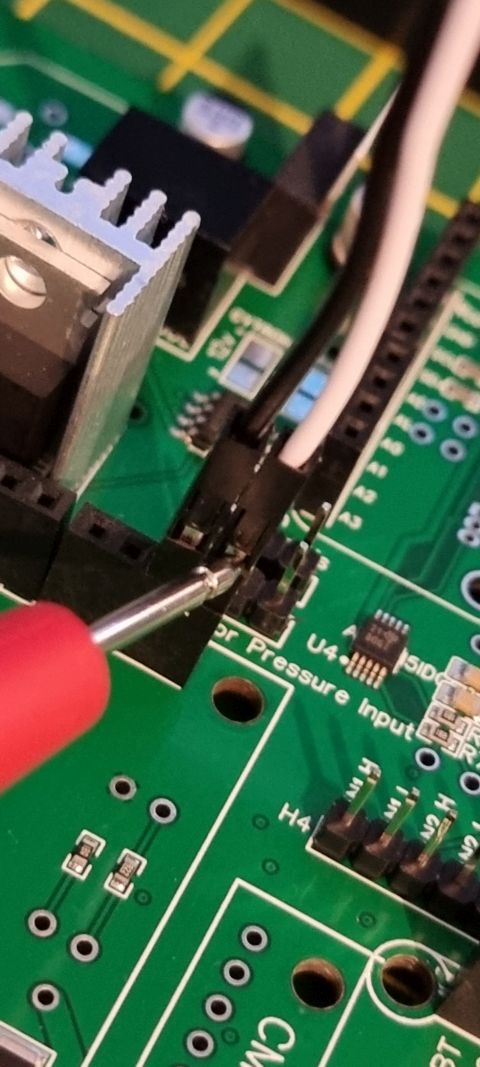
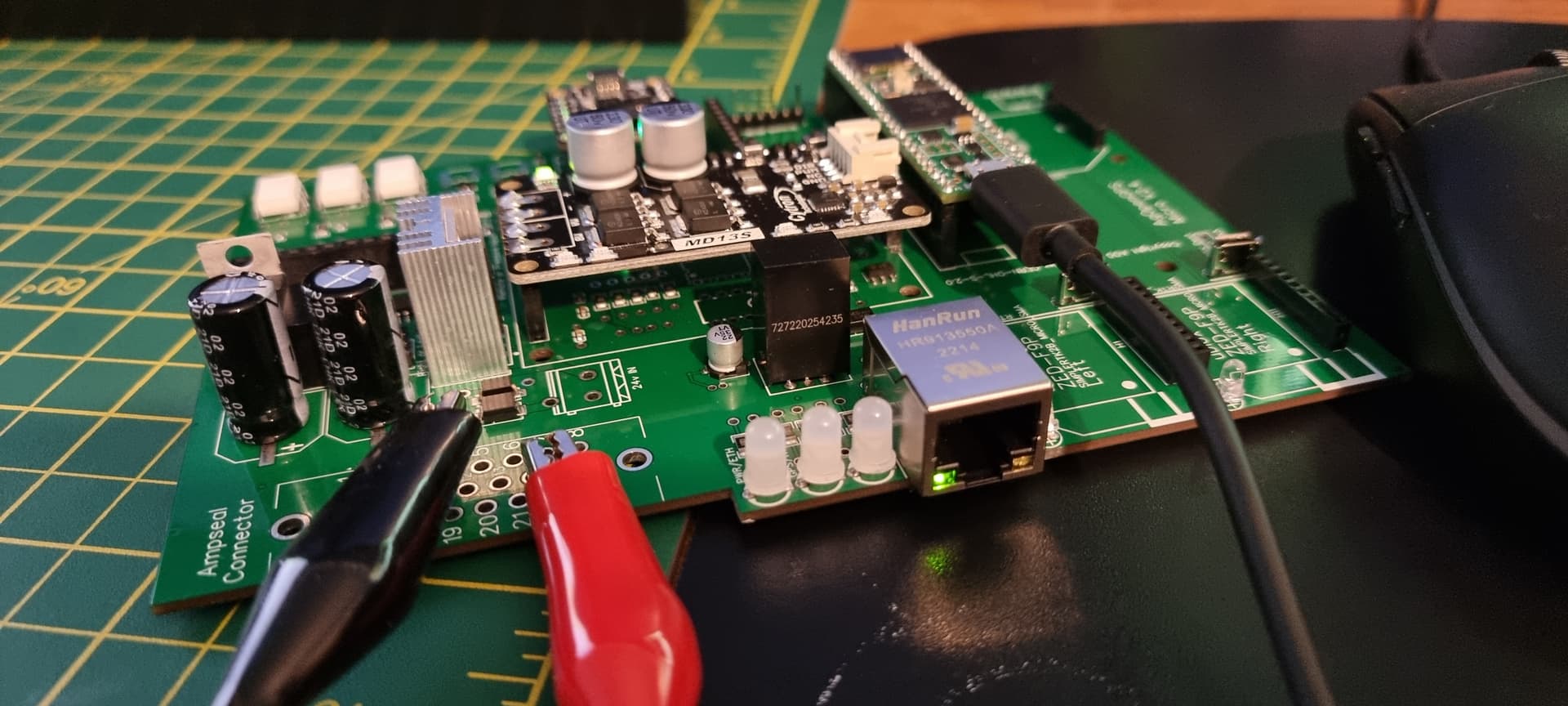
Gradually, I brought the voltage up, and no smoke. But no LEDs either… so I thought I’d press on anyway. I thought the best thing to check would be the Cytron input, as that should be 12V if all being well. I put some dupont wires in so I could connect my multimeter, and tested the two that provide the 12V sources, and they were good.
EDIT: Per jhmach’s instructions, NOW would be a GREAT time to test some critical voltages, before plugging any expensive stuff in. Don’t skip this step!!!
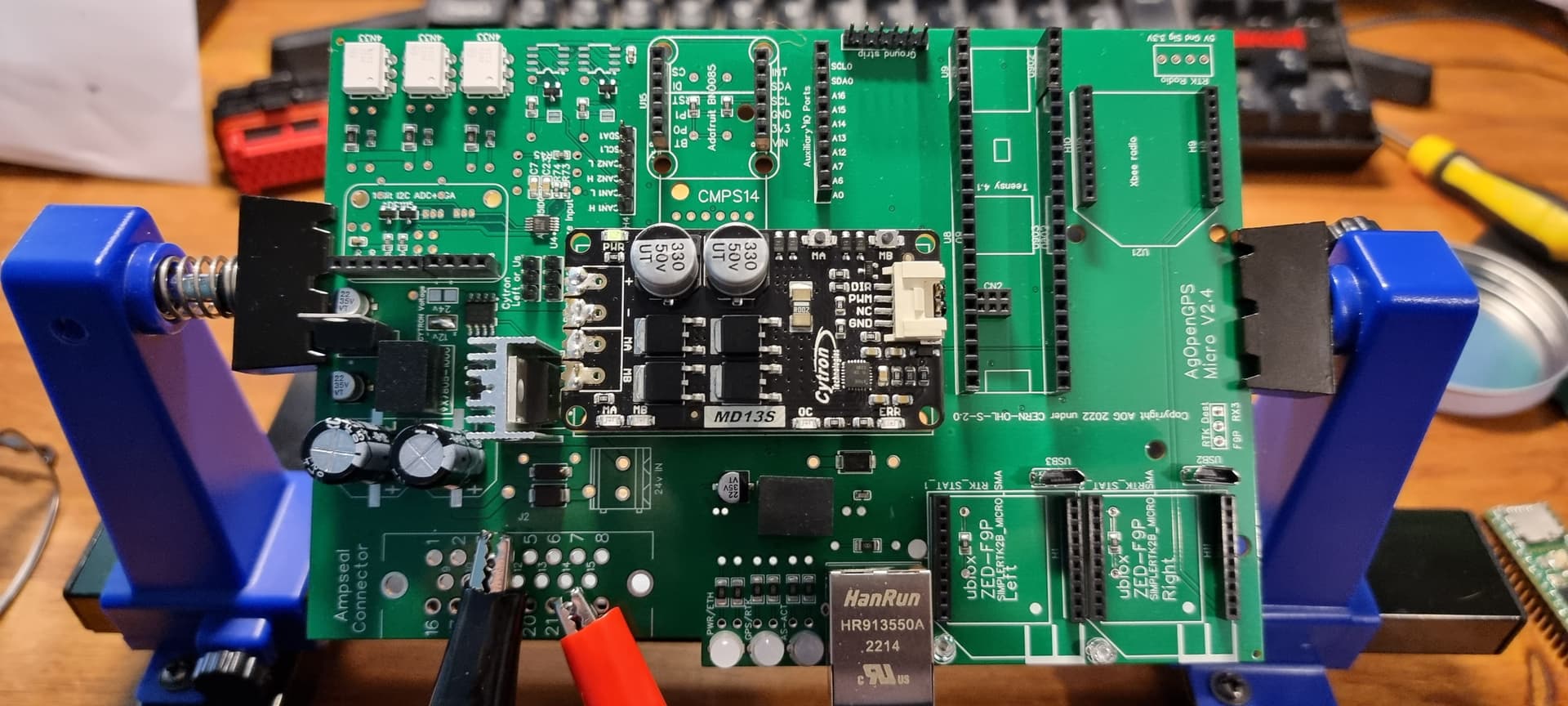
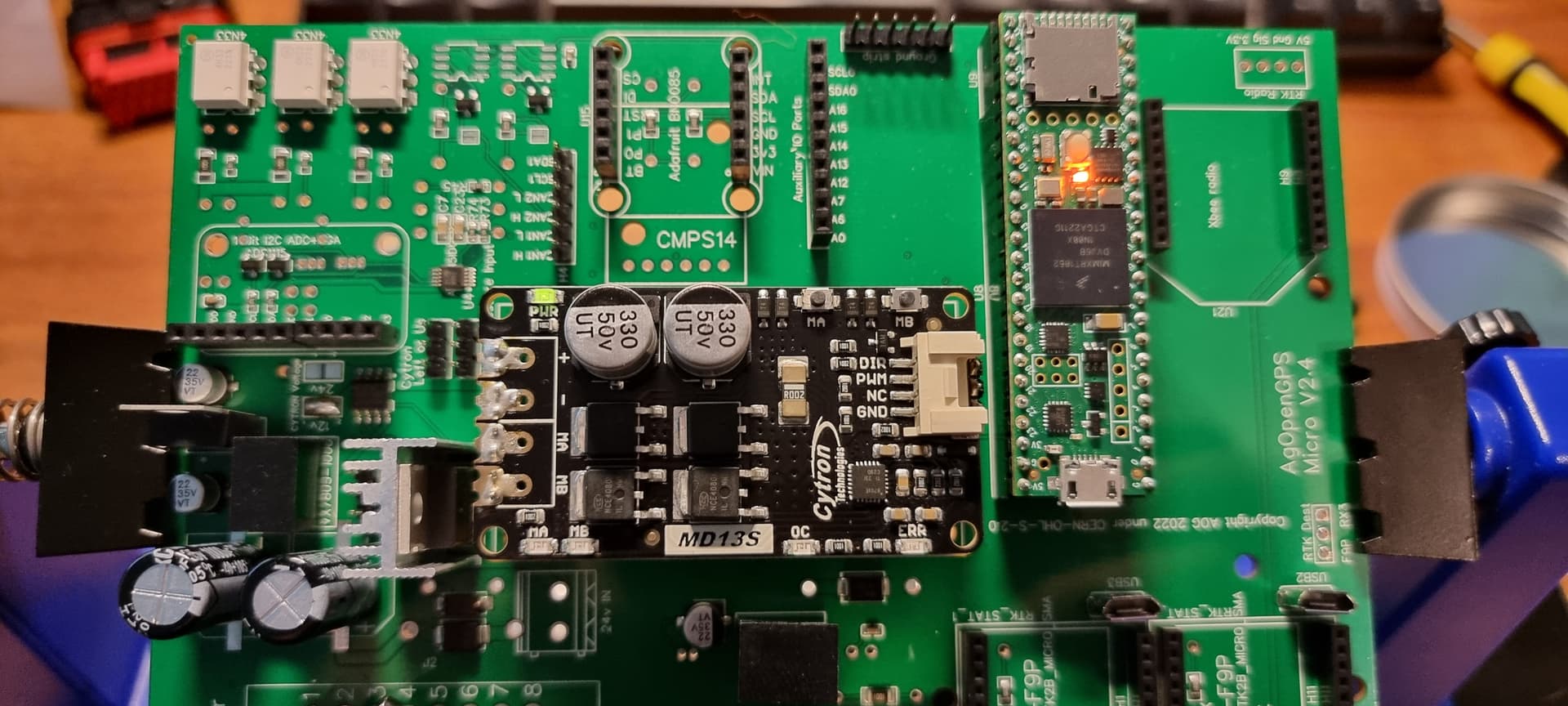
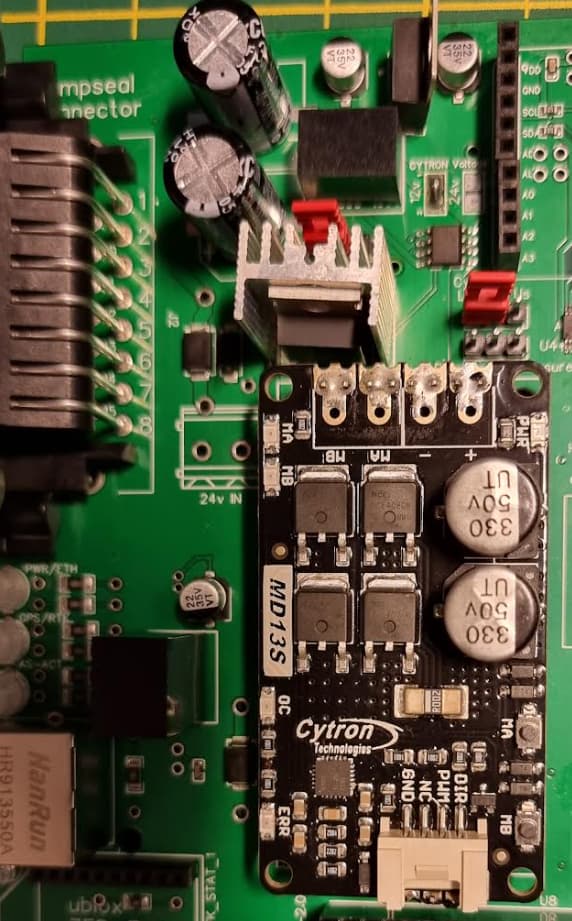
OK, time for some components then. Thought I’d start with the Cytron, which was a little difficult thanks to some bad header alignment from JLCPCB… placed an 8-pin header on the input side and a 3-pin on the control end. Because of how these fit, you actually solder the control end onto the edge of the PCB, not the holes underneath. Line them all up, do the control-end first as you don’t want the work at the other end making them impossible to align after. It’s not as tricky as you might think, steady hand and you’ll make a better job of it than I did.
NOTE: See warning on the top of page about not having board on 12V and Teensy on USB at the same time!
Back onto the power supply, and let’s bring it up slowly. At around 4V, the red “err” light came on on the Cytron, and around 7V it was all green continuing up to 12V. No problems!
I pressed the MA and MB buttons on the Teensy, and nothing died - the appropriate lights came on, so all good!
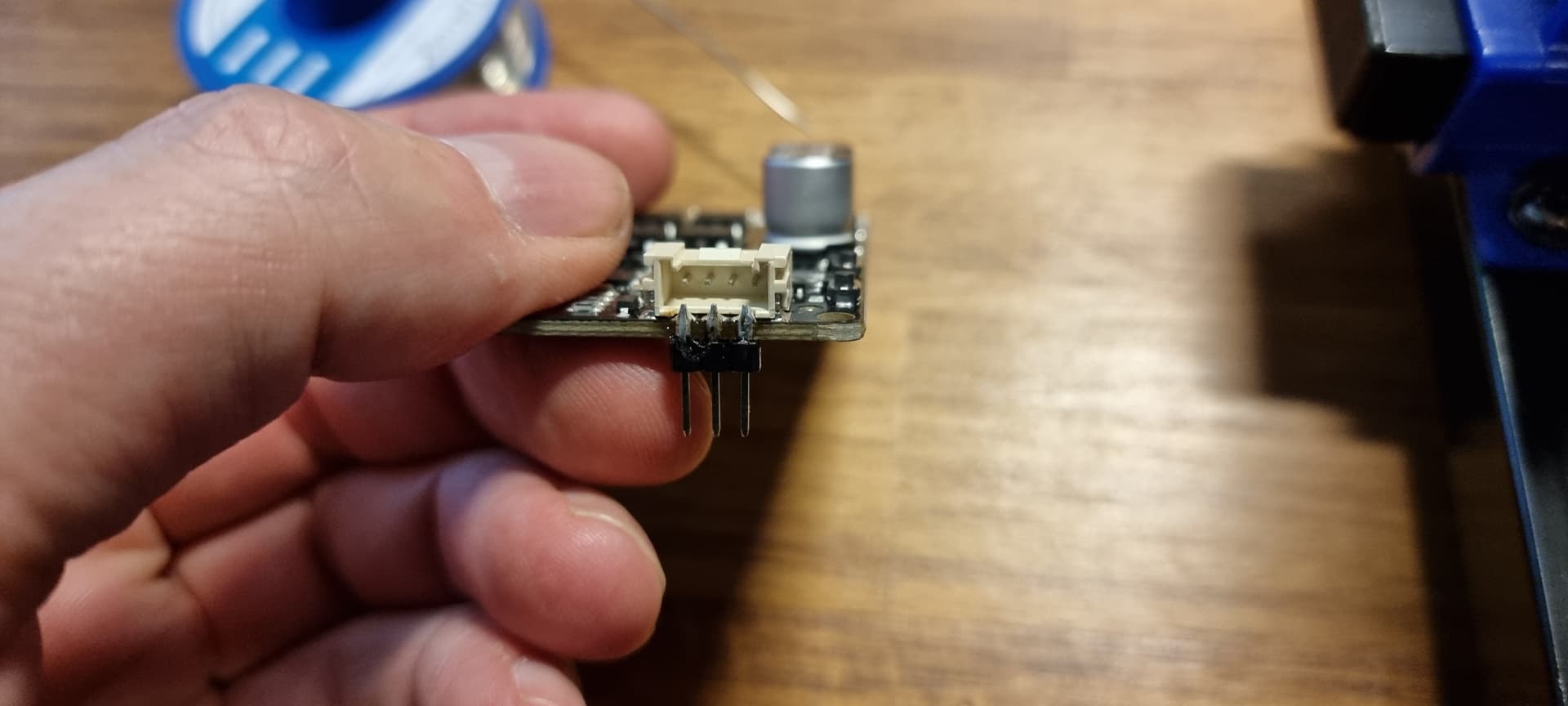
Powered back off, and you should be able to remove the Cytron easily enough and the control end will hopefully look prettier than this.
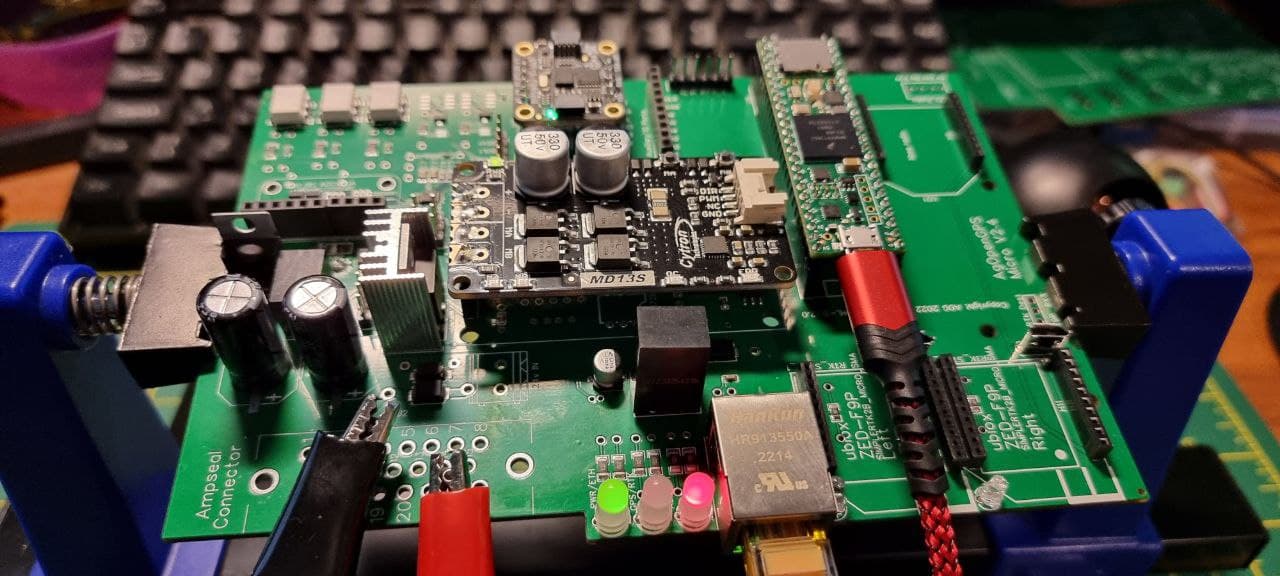
Next, I put the header pins in for the Teensy, to maintain alignment, and got soldering again. Back on the power supply, brought it up gradually again, and:
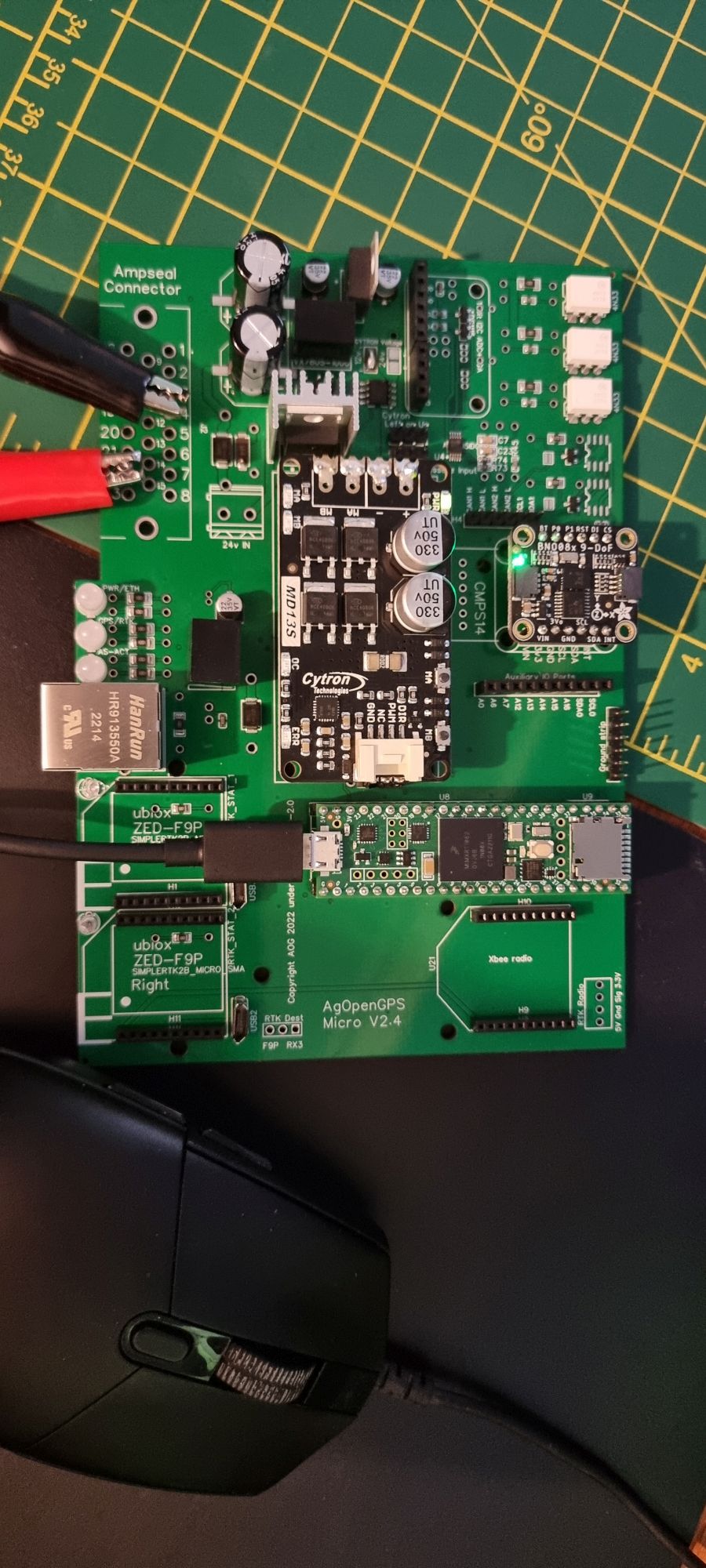
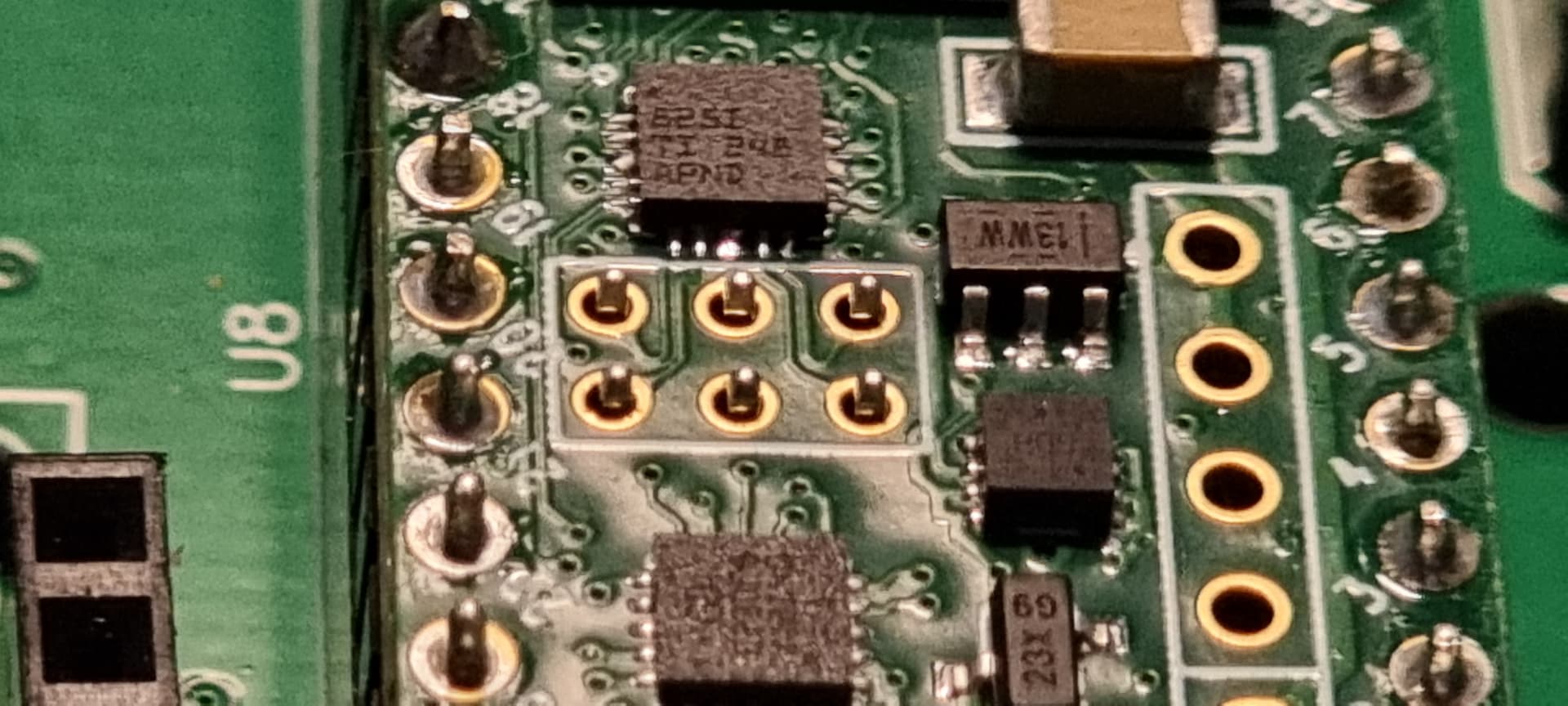
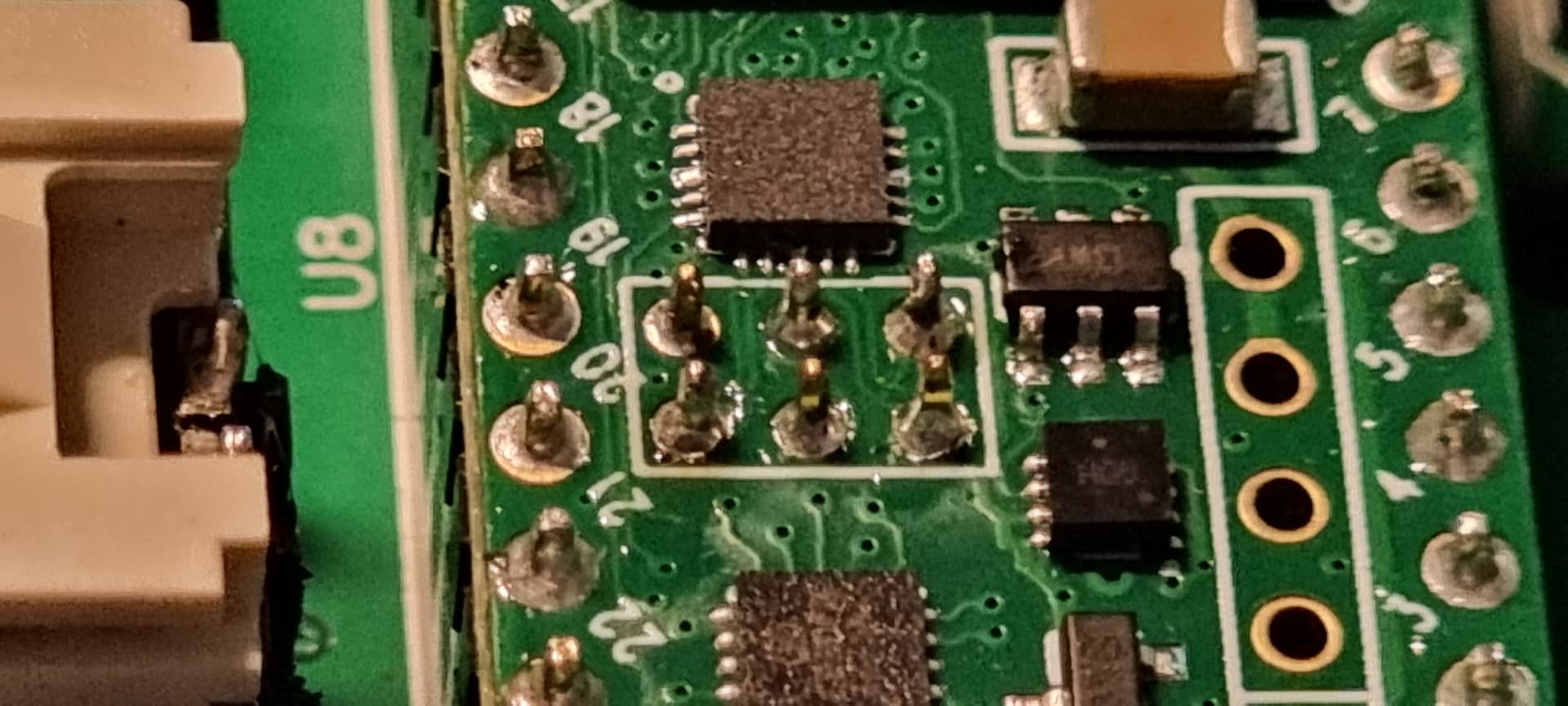
At this point, I had the default “blink” Teensy code loaded, hence the red light there. Also, I don’t have the ethernet pins for the Teensy, but as I can unplug it and refit when they arrive, I wasn’t too bothered for a test. Next, the BNO085 - placed the header pins in the board, dropped the BNO on top and soldered them to preserve alignment. Back onto the power supply, all good.
Flashed the Teensy with USB code, and back onto the power supply, and no lights on the Teensy. Hmmm… was it dead? No, it just doesn’t flash the LED with that code. Note the BNO light was on, once Teensy entered the game. Without Teensy, no BNO light.
NOTE: See warning on the top of page about not having board on 12V and Teensy on USB at the same time!
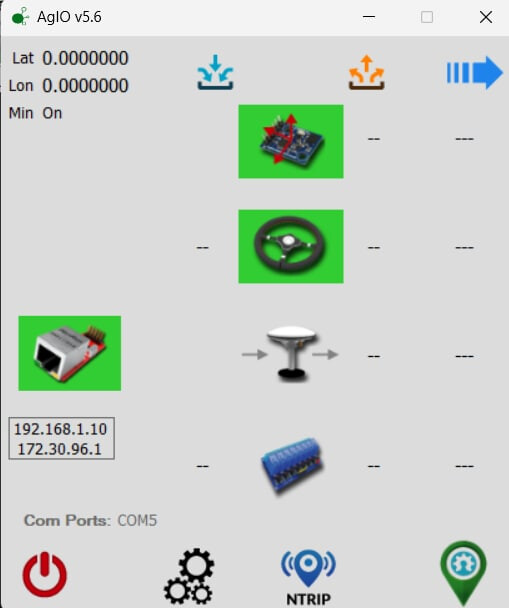
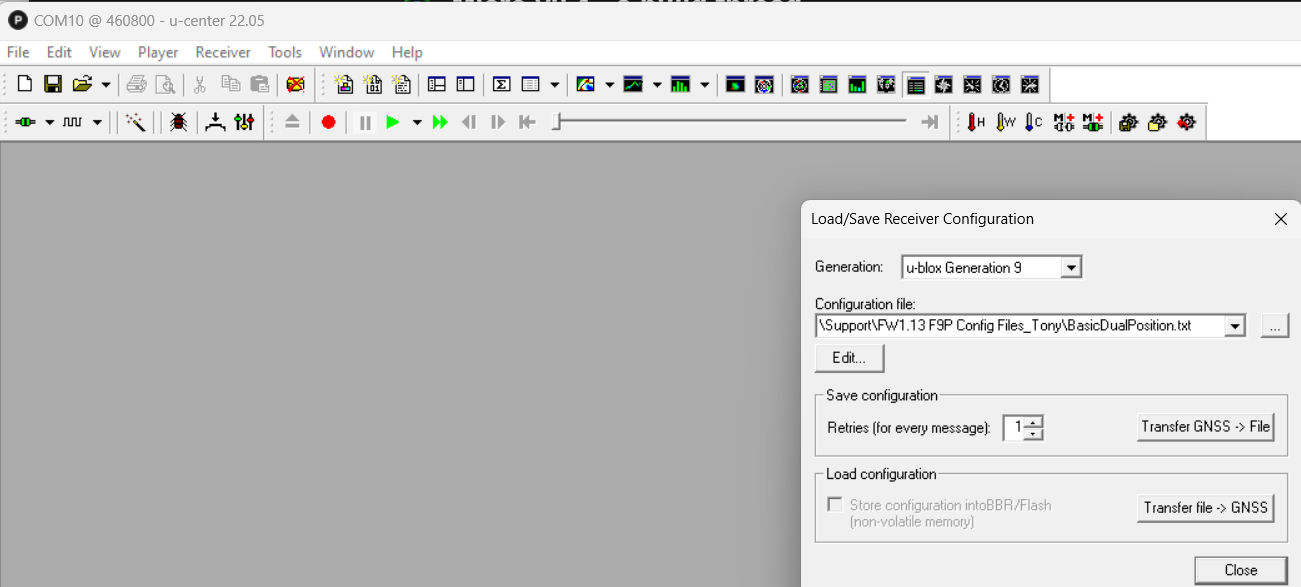
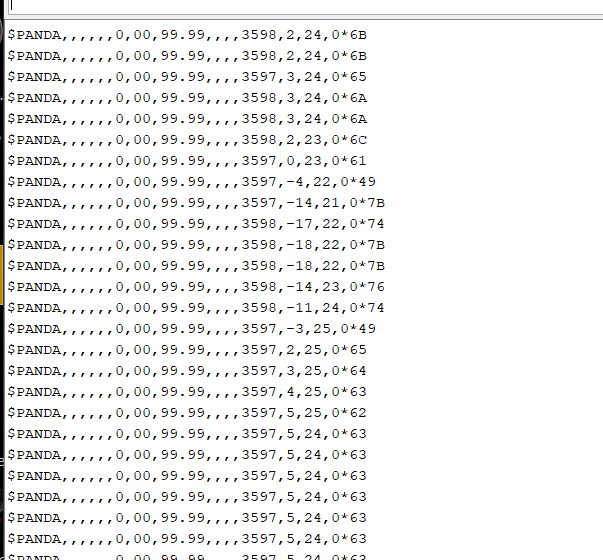
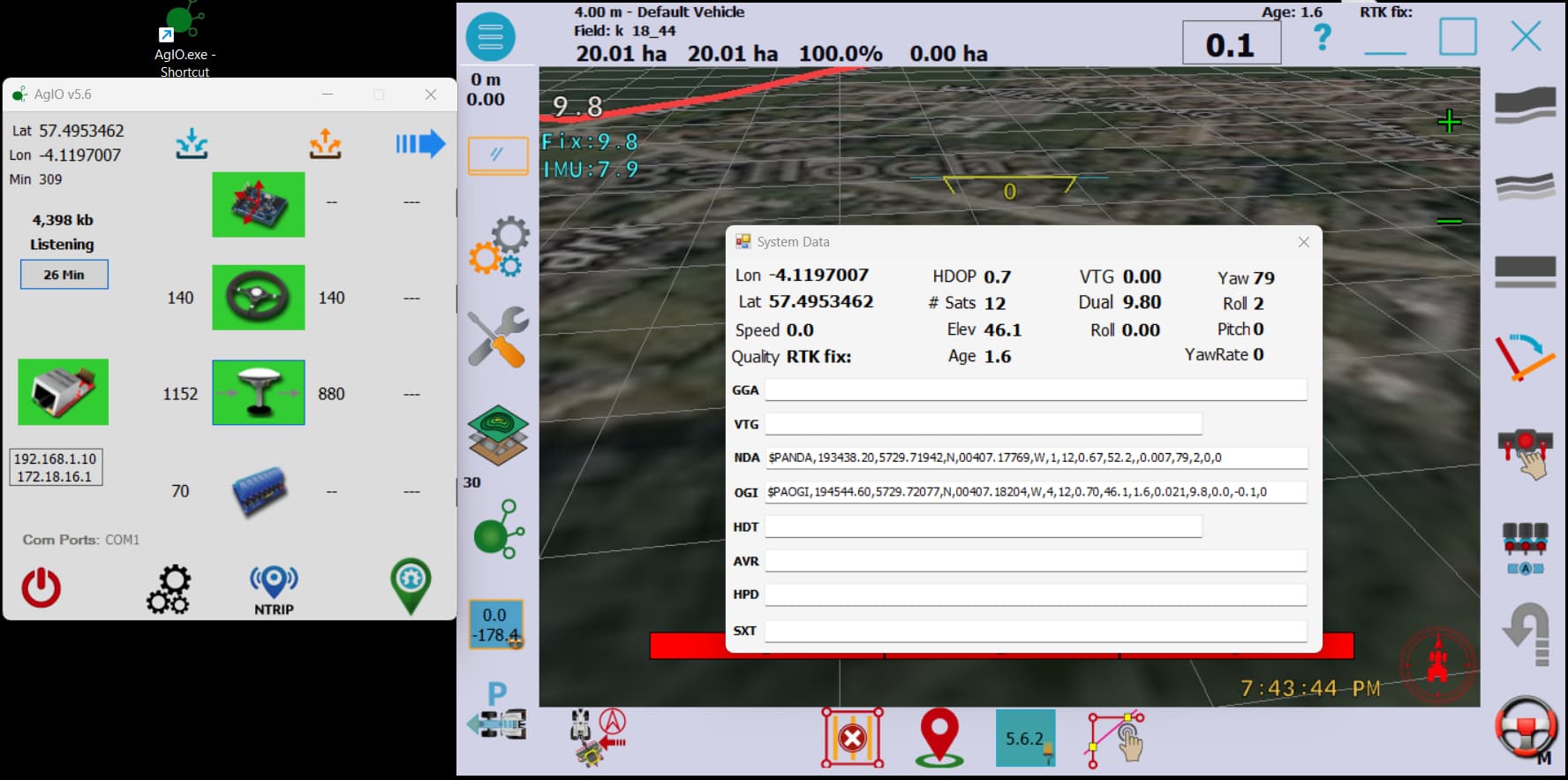
I’d already flashed it with the Panda code, so connected the USB up to the monitor on PC.
NOTE: See warning on the top of page about not having board on 12V and Teensy on USB at the same time!
Arduino IDE 1.8 is needed to flash a Teensy remember, and the port monitor showed:
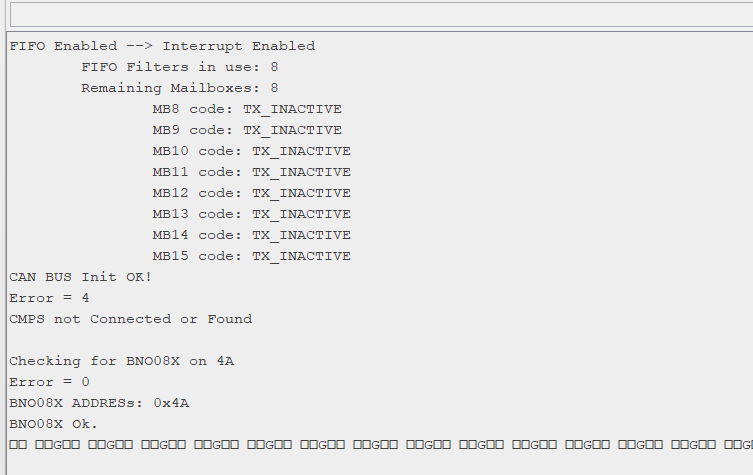
So, at this point, I’ve Cytron up and powered, and BNO talking to Teensy. I need to wait for some parts, mainly the Micro F9Ps and the pins to connect Teensy Ethernet, but at this stage, it’s looking pretty good I think.
EDIT: At this point, I should note that if you have dual antenna, you do NOT NEED THE BNO085 IMU. I didn’t know any better. Some people have pointed this out to me… so bear that in mind ![]()





{kind=link}