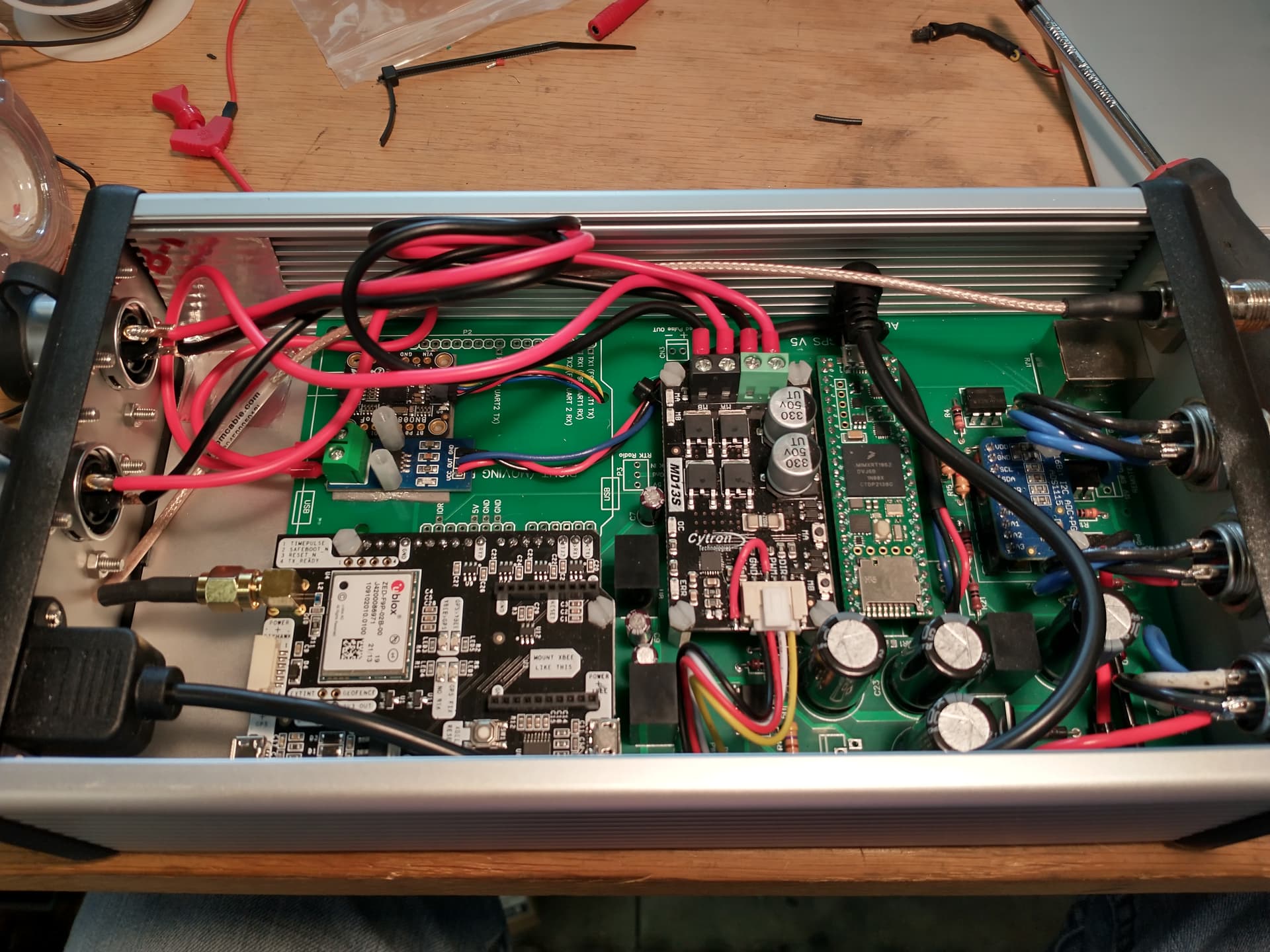
Here is the final build pictures of my dual board with a single GPS, BNO085 and ACS712. Note that I had to modify the autosteer.ino file per the following post to make the ACS712 work correctly.
https://discourse.agopengps.com/t/autosteer-disengagement-torque-measurement/1367/85
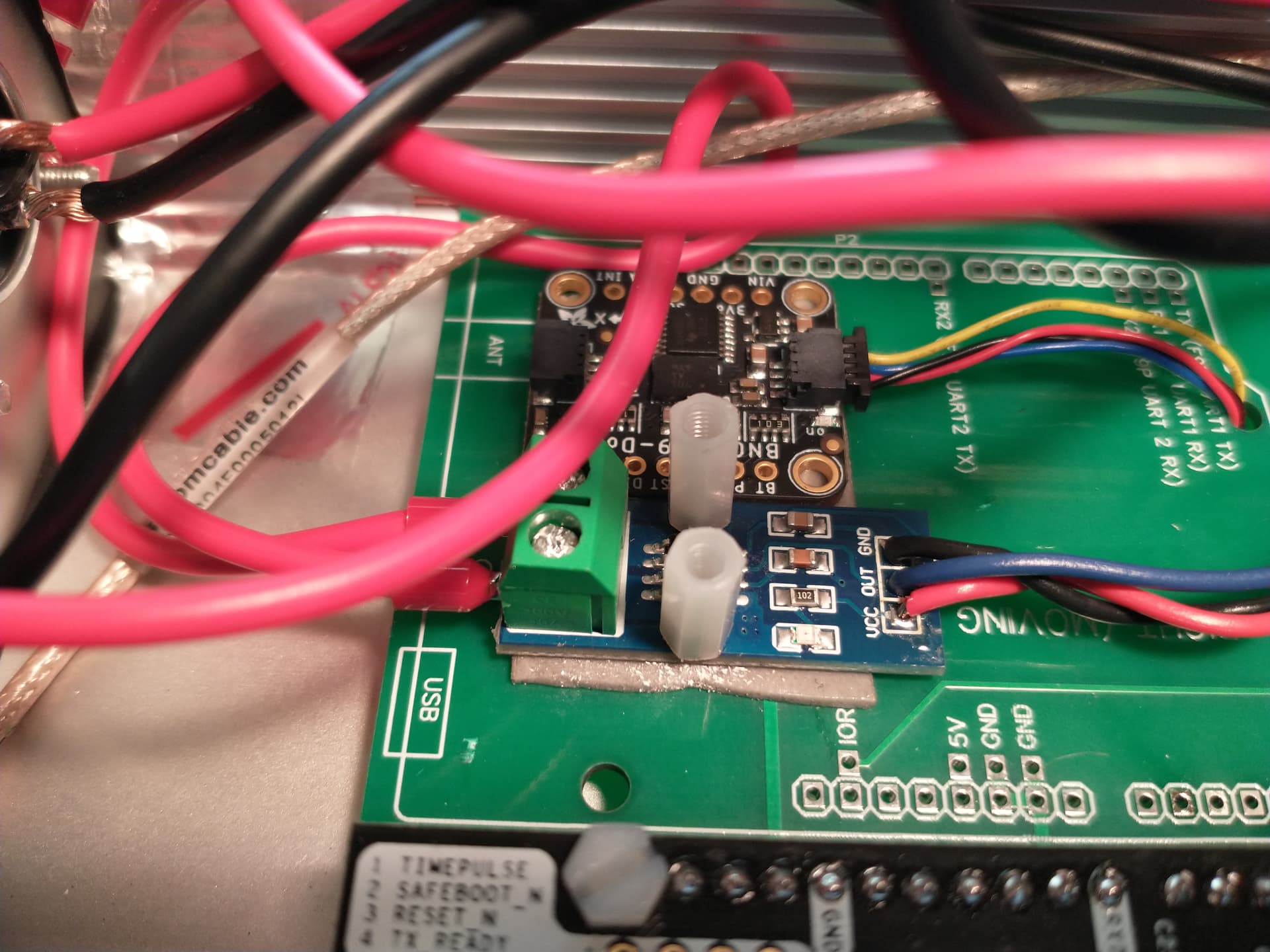
Picture of the BNO and the ACS712. I would have to use tall headers to get a second GPS installed above these.
Full board shot with in case.
Connectors on ethernet jack end.

Connectors on the motor power end.

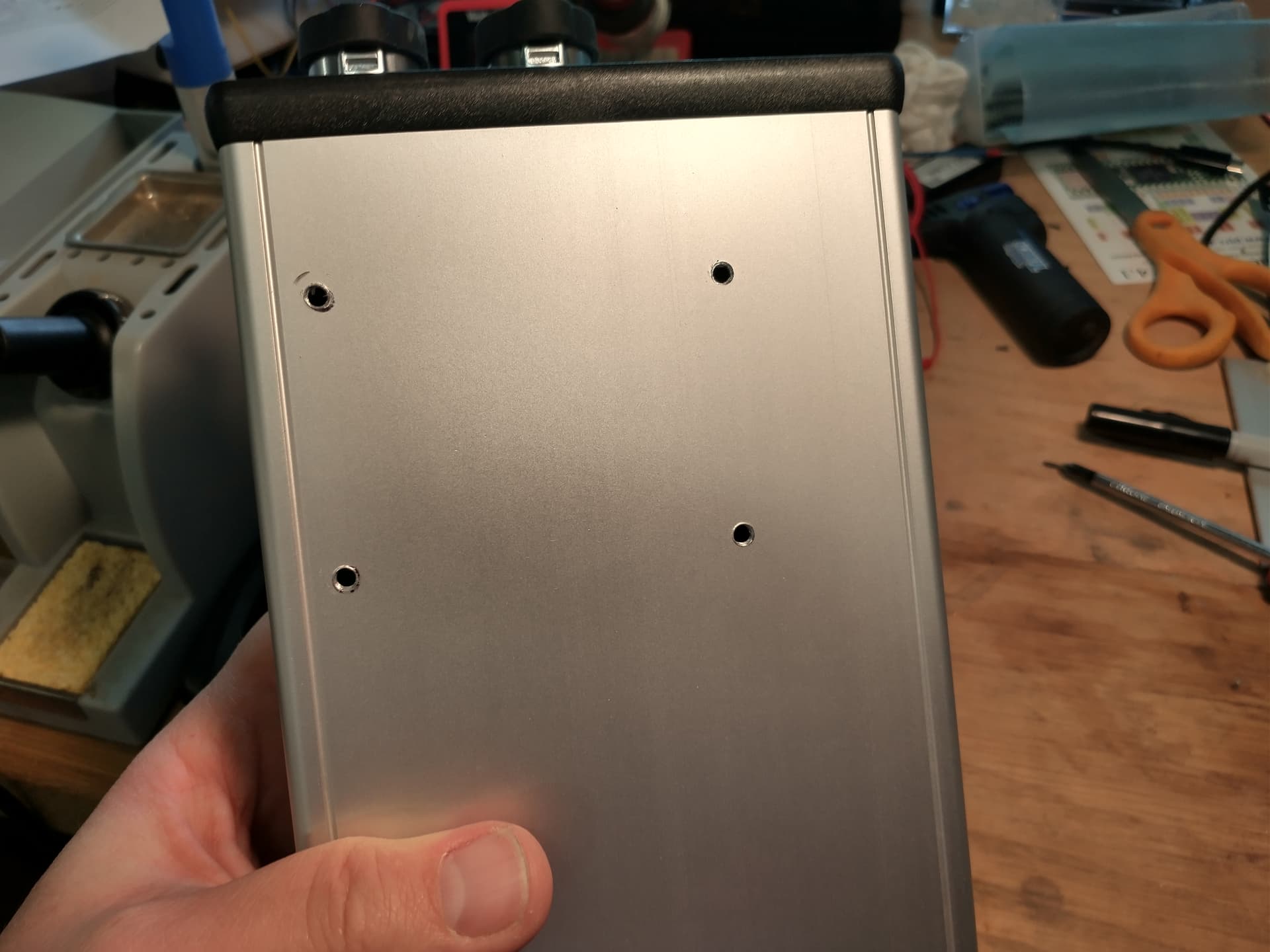
Tapped holes in the bottom to mount the 12V to 24V booster.
Thanks for the board design!